 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Tracking with Interacting Vehicles and Road Map Information
Paper and Code
Dec 20, 2018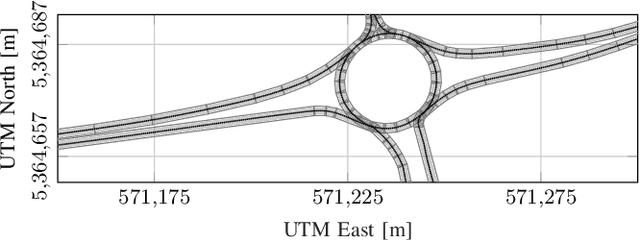
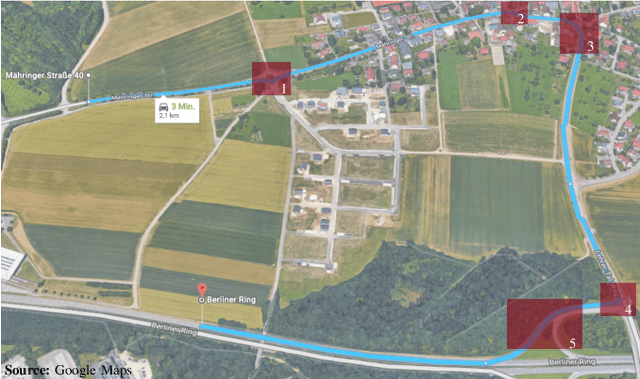
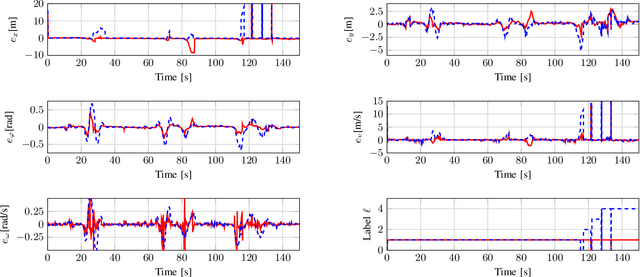
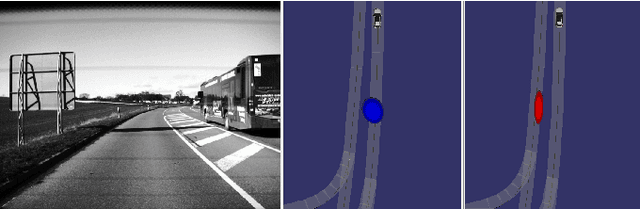
In many applications, tracking of multiple objects is crucial for a perception of the current environment. Most of the present multi-object tracking algorithms assume that objects move independently regarding other dynamic objects as well as the static environment. Since in many traffic situations objects interact with each other and in addition there are restrictions due to drivable areas, the assumption of an independent object motion is not fulfilled. This paper proposes an approach adapting a multi-object tracking system to model interaction between vehicles, and the current road geometry. Therefore, the prediction step of a Labeled Multi-Bernoulli filter is extended to facilitate modeling interaction between objects using the Intelligent Driver Model. Furthermore, to consider road map information, an approximation of a highly precise road map is used. The results show that in scenarios where the assumption of a standard motion model is violated, the tracking system adapted with the proposed method achieves higher accuracy and robustness in its track estimations.