 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSituation-Aware Environment Perception Using a Multi-Layer Attention Map
Dec 02, 2021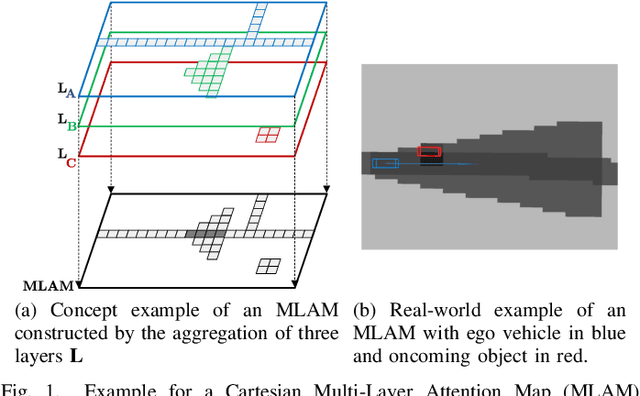
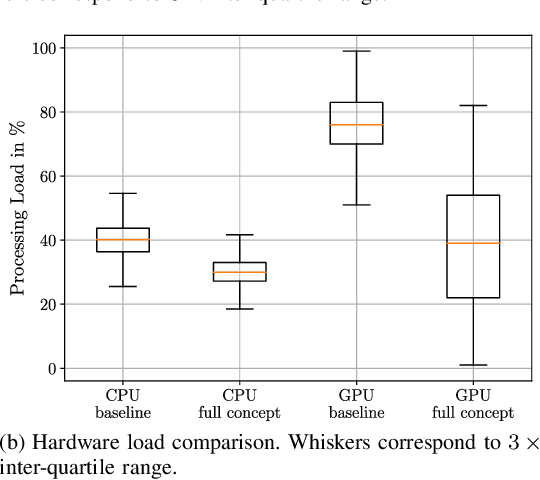
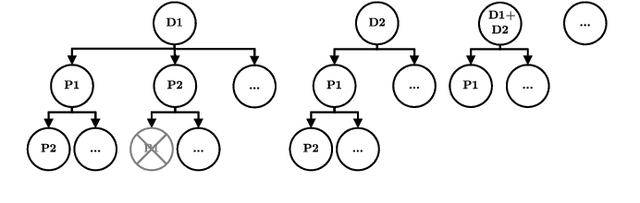
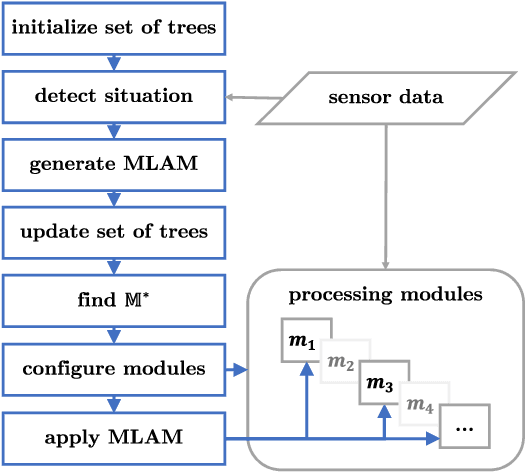
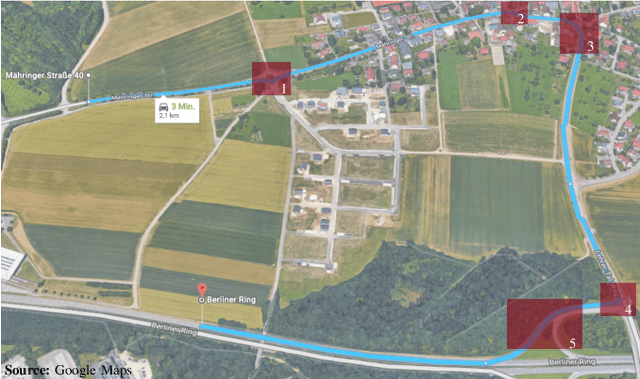
Within the field of automated driving, a clear trend in environment perception tends towards more sensors, higher redundancy, and overall increase in computational power. This is mainly driven by the paradigm to perceive the entire environment as best as possible at all times. However, due to the ongoing rise in functional complexity, compromises have to be considered to ensure real-time capabilities of the perception system. In this work, we introduce a concept for situation-aware environment perception to control the resource allocation towards processing relevant areas within the data as well as towards employing only a subset of functional modules for environment perception, if sufficient for the current driving task. Specifically, we propose to evaluate the context of an automated vehicle to derive a multi-layer attention map (MLAM) that defines relevant areas. Using this MLAM, the optimum of active functional modules is dynamically configured and intra-module processing of only relevant data is enforced. We outline the feasibility of application of our concept using real-world data in a straight-forward implementation for our system at hand. While retaining overall functionality, we achieve a reduction of accumulated processing time of 59%.
Extended Existence Probability Using Digital Maps for Object Verification
Mar 23, 2020
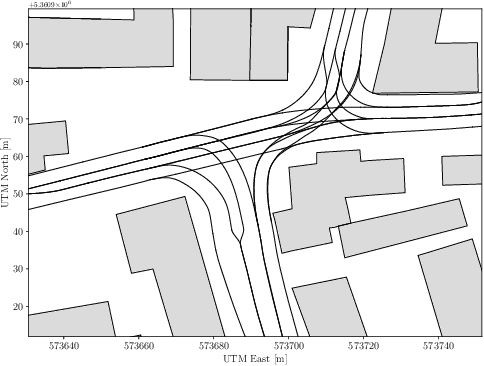
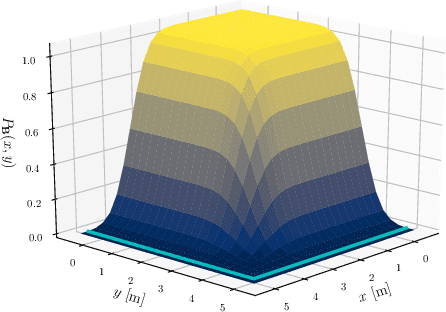
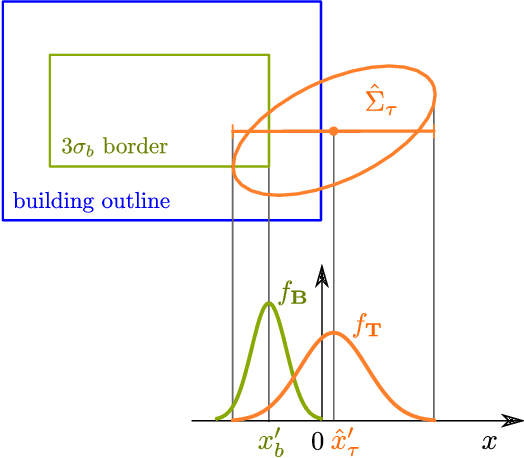
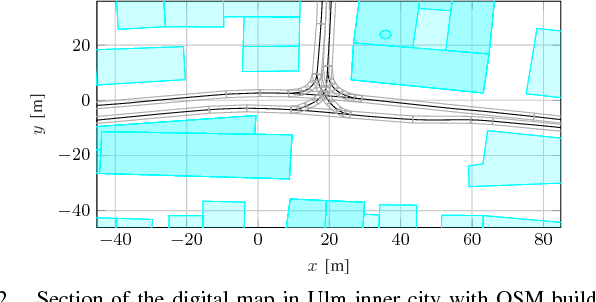
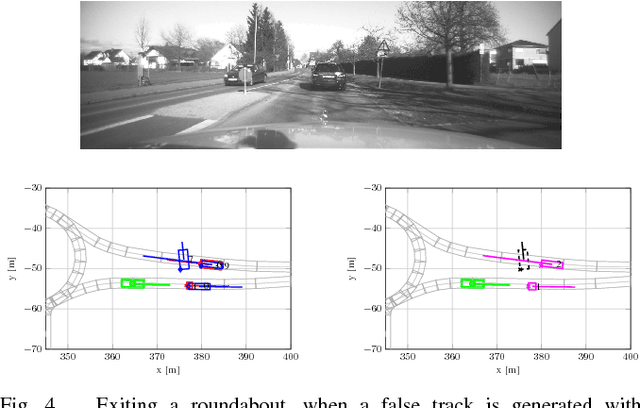
A main task for automated vehicles is a complete and robust environment perception. Especially, an error-free detection and modeling of other traffic participants is of great importance to drive safely in any situation. Therefore, multi-object tracking approaches, based on object detections from raw sensor measurements, are commonly used. However, false object hypothesis can occur due to complex, arbitrary scenarios with a high density of different traffic participants. For that reason, the presented approach introduces a probabilistic model to verify the existence of a track. Therefore, an object verification module is introduced, where the influences of multiple digital map elements on a track's existence are evaluated. Finally, a probabilistic model fuses the various influences and estimates an extended existence probability for every track. In addition, a Bayes Net is implemented as directed graphical model to highlight this work's expandability. The presented approach, reduces the number of false positives, while retaining true positives. Real world data is used to evaluate and highlight benefits of the presented approach, especially in urban scenarios.
Environment Perception Framework Fusing Multi-Object Tracking, Dynamic Occupancy Grid Maps and Digital Maps
Dec 20, 2018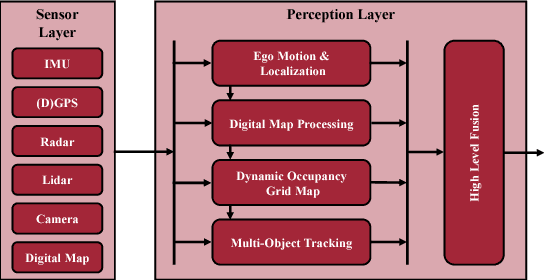
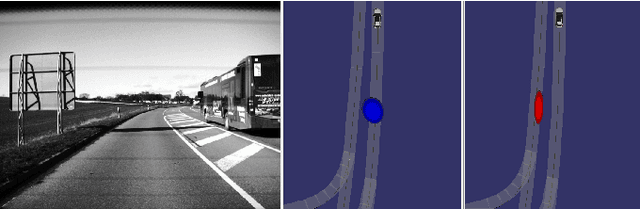
Autonomously driving vehicles require a complete and robust perception of the local environment. A main challenge is to perceive any other road users, where multi-object tracking or occupancy grid maps are commonly used. The presented approach combines both methods to compensate false positives and receive a complementary environment perception. Therefore, an environment perception framework is introduced that defines a common representation, extracts objects from a dynamic occupancy grid map and fuses them with tracks of a Labeled Multi-Bernoulli filter. Finally, a confidence value is developed, that validates object estimates using different constraints regarding physical possibilities, method specific characteristics and contextual information from a digital map. Experimental results with real world data highlight the robustness and significance of the presented fusing approach, utilizing the confidence value in rural and urban scenarios.
Multi-Object Tracking with Interacting Vehicles and Road Map Information
Dec 20, 2018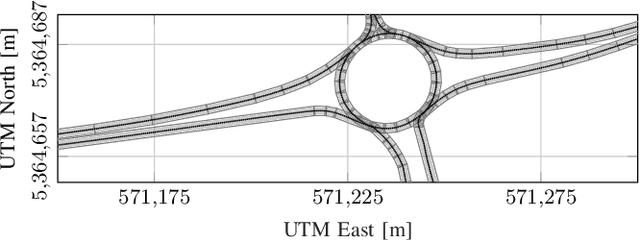
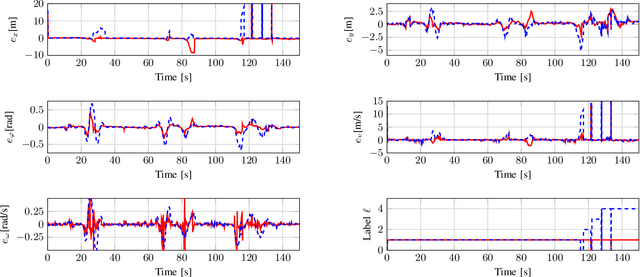
In many applications, tracking of multiple objects is crucial for a perception of the current environment. Most of the present multi-object tracking algorithms assume that objects move independently regarding other dynamic objects as well as the static environment. Since in many traffic situations objects interact with each other and in addition there are restrictions due to drivable areas, the assumption of an independent object motion is not fulfilled. This paper proposes an approach adapting a multi-object tracking system to model interaction between vehicles, and the current road geometry. Therefore, the prediction step of a Labeled Multi-Bernoulli filter is extended to facilitate modeling interaction between objects using the Intelligent Driver Model. Furthermore, to consider road map information, an approximation of a highly precise road map is used. The results show that in scenarios where the assumption of a standard motion model is violated, the tracking system adapted with the proposed method achieves higher accuracy and robustness in its track estimations.
Offline Object Extraction from Dynamic Occupancy Grid Map Sequences
Apr 11, 2018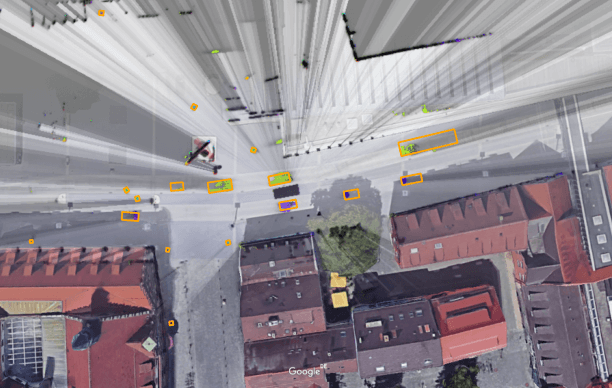
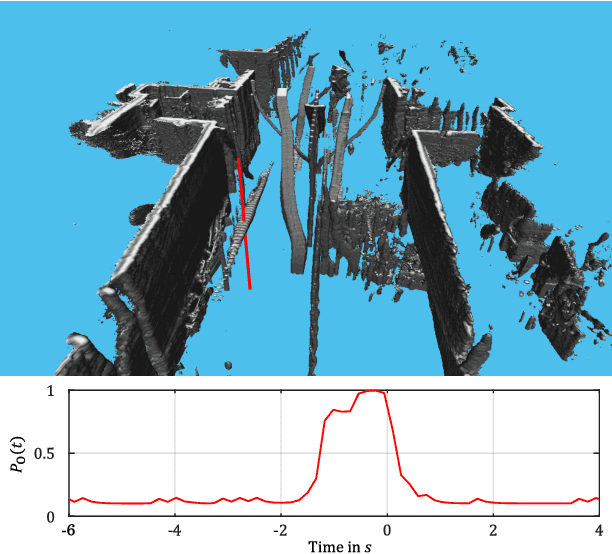
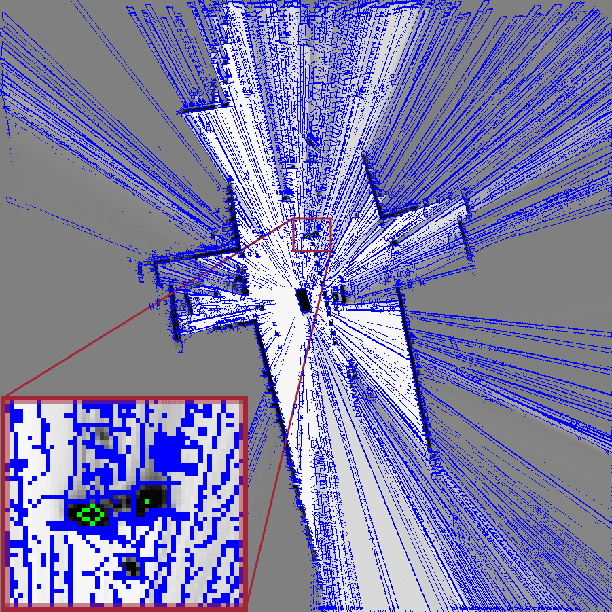
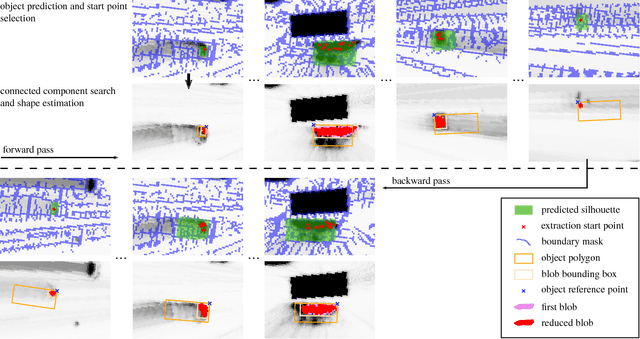
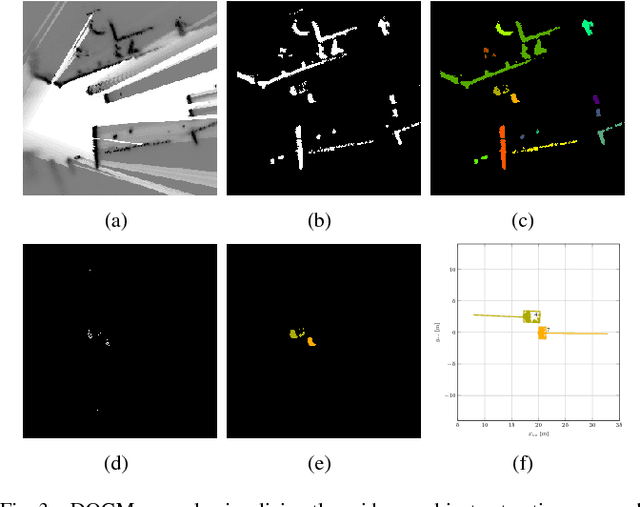
A dynamic occupancy grid map (DOGMa) allows a fast, robust, and complete environment representation for automated vehicles. Dynamic objects in a DOGMa, however, are commonly represented as independent cells while modeled objects with shape and pose are favorable. The evaluation of algorithms for object extraction or the training and validation of learning algorithms rely on labeled ground truth data. Manually annotating objects in a DOGMa to obtain ground truth data is a time consuming and expensive process. Additionally the quality of labeled data depend strongly on the variation of filtered input data. The presented work introduces an automatic labeling process, where a full sequence is used to extract the best possible object pose and shape in terms of temporal consistency. A two direction temporal search is executed to trace single objects over a sequence, where the best estimate of its extent and pose is refined in every time step. Furthermore, the presented algorithm only uses statistical constraints of the cell clusters for the object extraction instead of fixed heuristic parameters. Experimental results show a well-performing automatic labeling algorithm with real sensor data even at challenging scenarios.