 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Patched Grid Mapping
Paper and Code
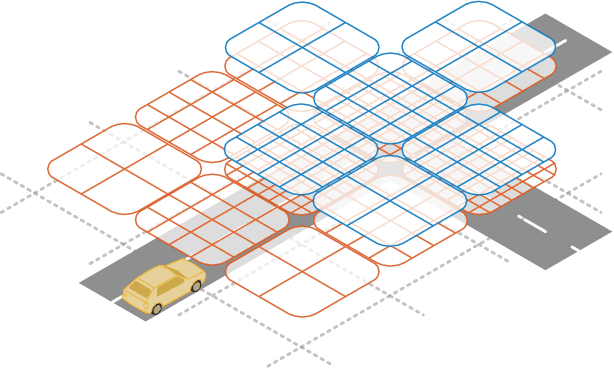
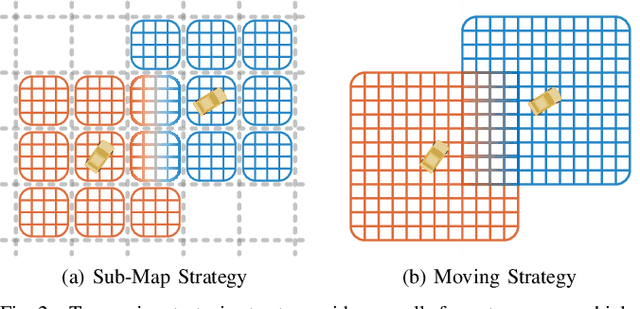
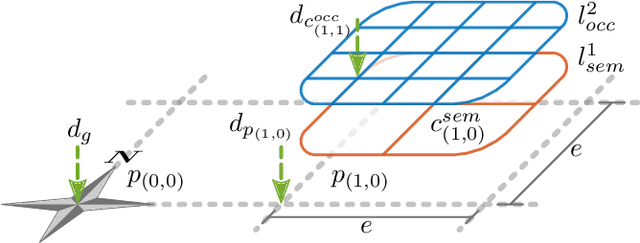
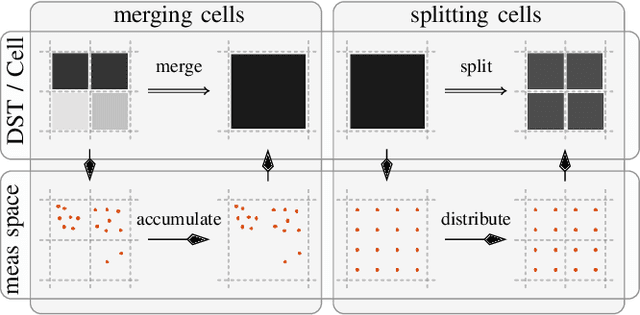
In this work, we propose a novel adaptive grid mapping approach, the Adaptive Patched Grid Map, which enables a situational aware grid based perception for autonomous vehicles. Its structure allows a flexible representation of the surrounding unstructured environment. By splitting types of information into separate layers less memory is allocated when data is unevenly or sporadically available. However, layers must be resampled during the fusion process to cope with dynamically changing cell sizes. Therefore, we propose a novel spatial cell fusion approach. Together with the proposed fusion framework, dynamically changing external requirements, such as cell resolution specifications and horizon targets, are considered. For our evaluation, real-world data were recorded from an autonomous vehicle driving through various traffic situations. Based on this, the memory efficiency is compared to other approaches, and fusion execution times are determined. The results confirm the adaptation to requirement changes and a significant memory usage reduction.