 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Intrinsic Image Decomposition
Feb 05, 2018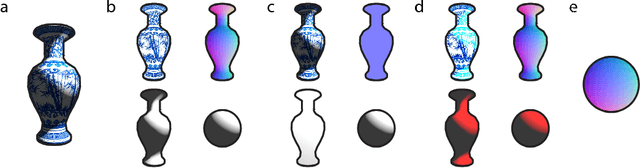
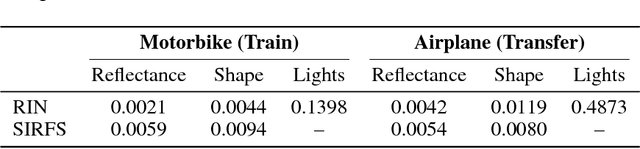
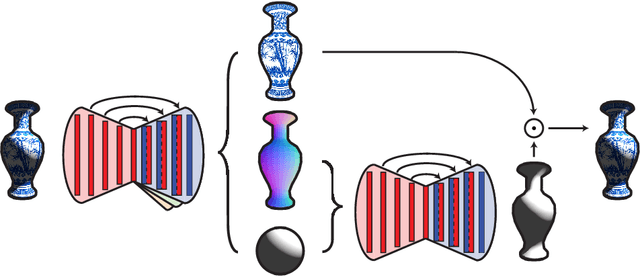

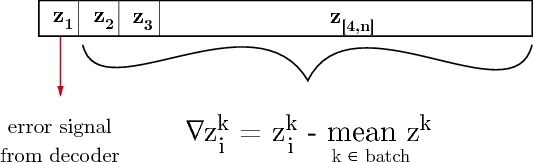
Intrinsic decomposition from a single image is a highly challenging task, due to its inherent ambiguity and the scarcity of training data. In contrast to traditional fully supervised learning approaches, in this paper we propose learning intrinsic image decomposition by explaining the input image. Our model, the Rendered Intrinsics Network (RIN), joins together an image decomposition pipeline, which predicts reflectance, shape, and lighting conditions given a single image, with a recombination function, a learned shading model used to recompose the original input based off of intrinsic image predictions. Our network can then use unsupervised reconstruction error as an additional signal to improve its intermediate representations. This allows large-scale unlabeled data to be useful during training, and also enables transferring learned knowledge to images of unseen object categories, lighting conditions, and shapes. Extensive experiments demonstrate that our method performs well on both intrinsic image decomposition and knowledge transfer.
Deep Successor Reinforcement Learning
Jun 08, 2016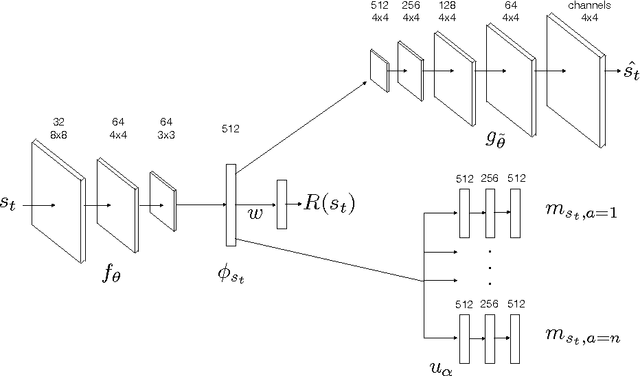
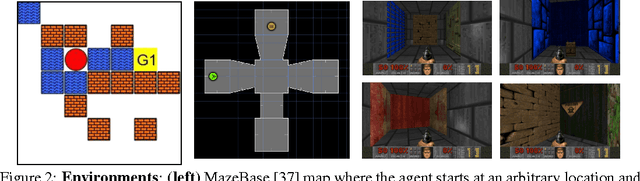
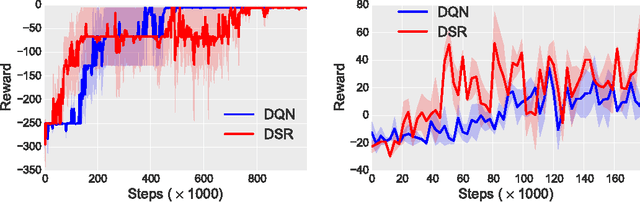
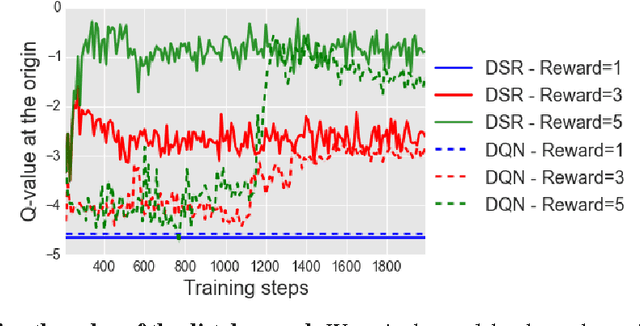
Learning robust value functions given raw observations and rewards is now possible with model-free and model-based deep reinforcement learning algorithms. There is a third alternative, called Successor Representations (SR), which decomposes the value function into two components -- a reward predictor and a successor map. The successor map represents the expected future state occupancy from any given state and the reward predictor maps states to scalar rewards. The value function of a state can be computed as the inner product between the successor map and the reward weights. In this paper, we present DSR, which generalizes SR within an end-to-end deep reinforcement learning framework. DSR has several appealing properties including: increased sensitivity to distal reward changes due to factorization of reward and world dynamics, and the ability to extract bottleneck states (subgoals) given successor maps trained under a random policy. We show the efficacy of our approach on two diverse environments given raw pixel observations -- simple grid-world domains (MazeBase) and the Doom game engine.
Hierarchical Deep Reinforcement Learning: Integrating Temporal Abstraction and Intrinsic Motivation
May 31, 2016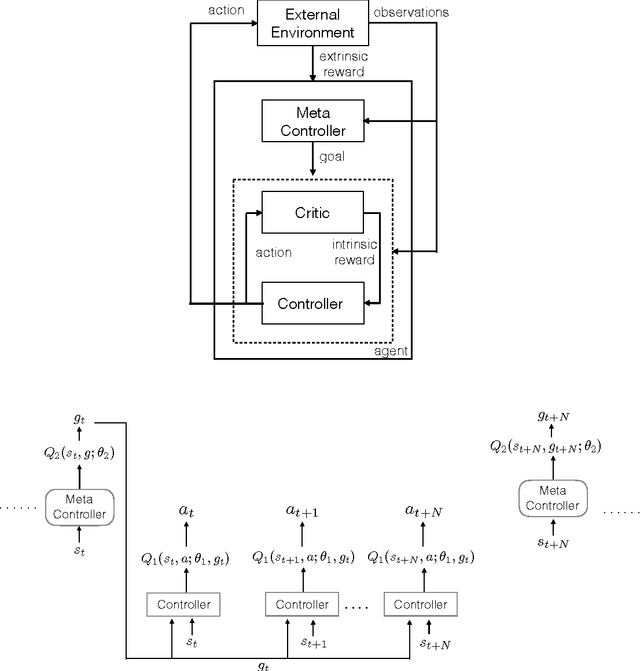
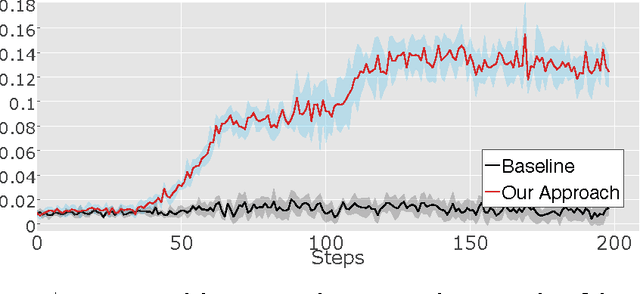
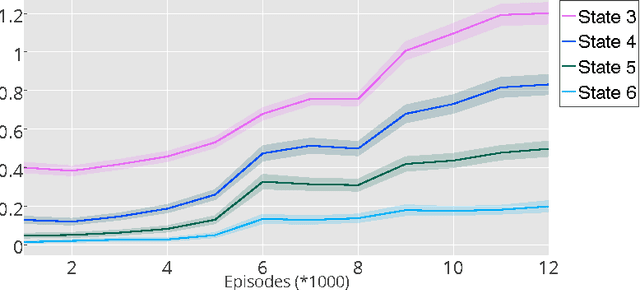
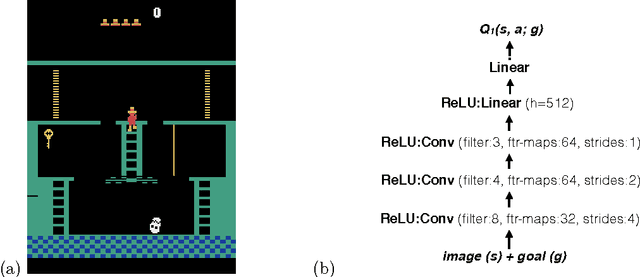
Learning goal-directed behavior in environments with sparse feedback is a major challenge for reinforcement learning algorithms. The primary difficulty arises due to insufficient exploration, resulting in an agent being unable to learn robust value functions. Intrinsically motivated agents can explore new behavior for its own sake rather than to directly solve problems. Such intrinsic behaviors could eventually help the agent solve tasks posed by the environment. We present hierarchical-DQN (h-DQN), a framework to integrate hierarchical value functions, operating at different temporal scales, with intrinsically motivated deep reinforcement learning. A top-level value function learns a policy over intrinsic goals, and a lower-level function learns a policy over atomic actions to satisfy the given goals. h-DQN allows for flexible goal specifications, such as functions over entities and relations. This provides an efficient space for exploration in complicated environments. We demonstrate the strength of our approach on two problems with very sparse, delayed feedback: (1) a complex discrete stochastic decision process, and (2) the classic ATARI game `Montezuma's Revenge'.
Deep Convolutional Inverse Graphics Network
Jun 22, 2015

This paper presents the Deep Convolution Inverse Graphics Network (DC-IGN), a model that learns an interpretable representation of images. This representation is disentangled with respect to transformations such as out-of-plane rotations and lighting variations. The DC-IGN model is composed of multiple layers of convolution and de-convolution operators and is trained using the Stochastic Gradient Variational Bayes (SGVB) algorithm. We propose a training procedure to encourage neurons in the graphics code layer to represent a specific transformation (e.g. pose or light). Given a single input image, our model can generate new images of the same object with variations in pose and lighting. We present qualitative and quantitative results of the model's efficacy at learning a 3D rendering engine.
Inverse Graphics with Probabilistic CAD Models
Jul 04, 2014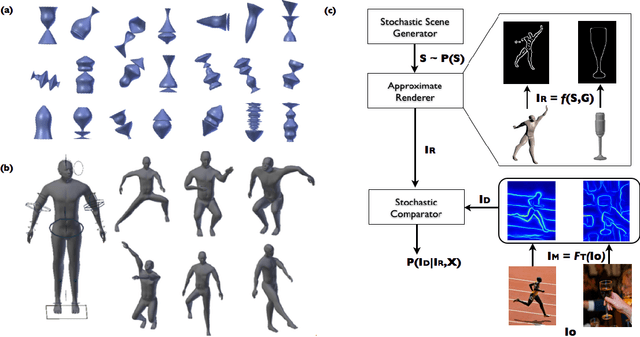
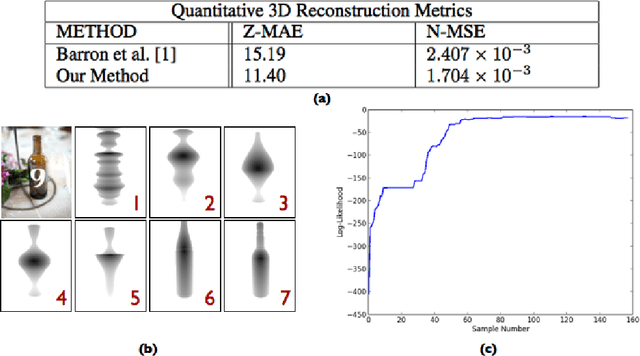
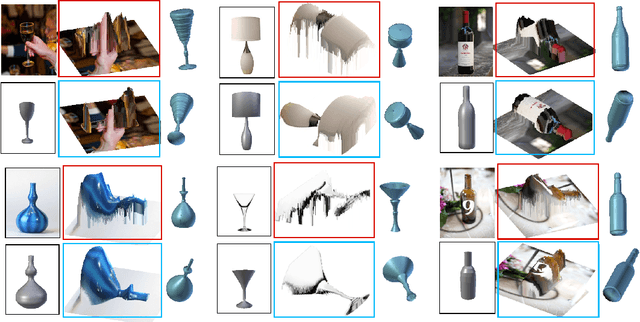
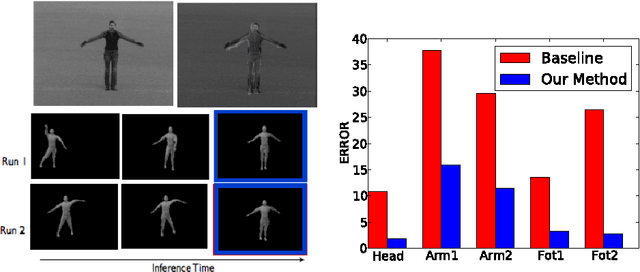
Recently, multiple formulations of vision problems as probabilistic inversions of generative models based on computer graphics have been proposed. However, applications to 3D perception from natural images have focused on low-dimensional latent scenes, due to challenges in both modeling and inference. Accounting for the enormous variability in 3D object shape and 2D appearance via realistic generative models seems intractable, as does inverting even simple versions of the many-to-many computations that link 3D scenes to 2D images. This paper proposes and evaluates an approach that addresses key aspects of both these challenges. We show that it is possible to solve challenging, real-world 3D vision problems by approximate inference in generative models for images based on rendering the outputs of probabilistic CAD (PCAD) programs. Our PCAD object geometry priors generate deformable 3D meshes corresponding to plausible objects and apply affine transformations to place them in a scene. Image likelihoods are based on similarity in a feature space based on standard mid-level image representations from the vision literature. Our inference algorithm integrates single-site and locally blocked Metropolis-Hastings proposals, Hamiltonian Monte Carlo and discriminative data-driven proposals learned from training data generated from our models. We apply this approach to 3D human pose estimation and object shape reconstruction from single images, achieving quantitative and qualitative performance improvements over state-of-the-art baselines.
Approximate Bayesian Image Interpretation using Generative Probabilistic Graphics Programs
Jun 29, 2013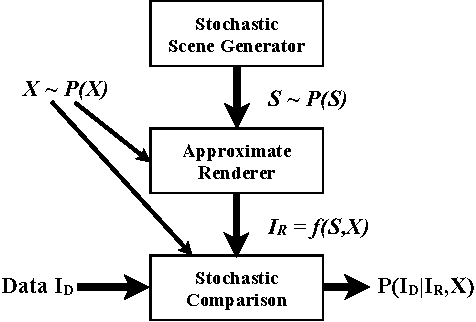

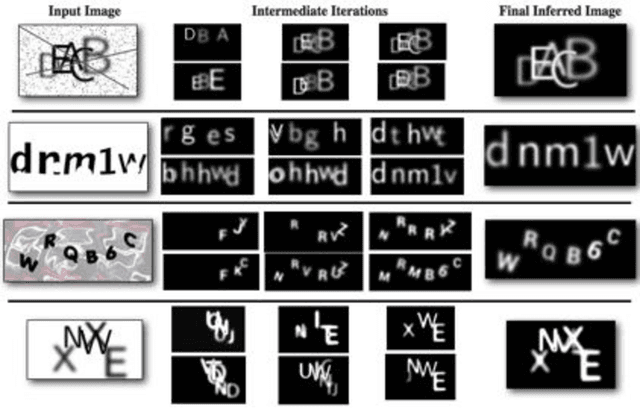
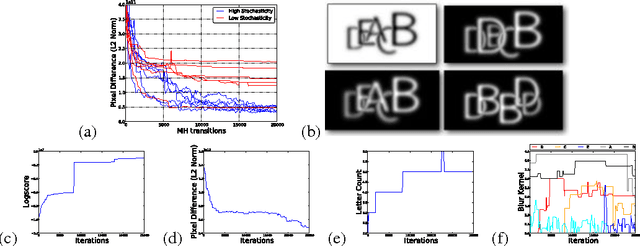
The idea of computer vision as the Bayesian inverse problem to computer graphics has a long history and an appealing elegance, but it has proved difficult to directly implement. Instead, most vision tasks are approached via complex bottom-up processing pipelines. Here we show that it is possible to write short, simple probabilistic graphics programs that define flexible generative models and to automatically invert them to interpret real-world images. Generative probabilistic graphics programs consist of a stochastic scene generator, a renderer based on graphics software, a stochastic likelihood model linking the renderer's output and the data, and latent variables that adjust the fidelity of the renderer and the tolerance of the likelihood model. Representations and algorithms from computer graphics, originally designed to produce high-quality images, are instead used as the deterministic backbone for highly approximate and stochastic generative models. This formulation combines probabilistic programming, computer graphics, and approximate Bayesian computation, and depends only on general-purpose, automatic inference techniques. We describe two applications: reading sequences of degraded and adversarially obscured alphanumeric characters, and inferring 3D road models from vehicle-mounted camera images. Each of the probabilistic graphics programs we present relies on under 20 lines of probabilistic code, and supports accurate, approximately Bayesian inferences about ambiguous real-world images.