 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Successor Reinforcement Learning
Jun 08, 2016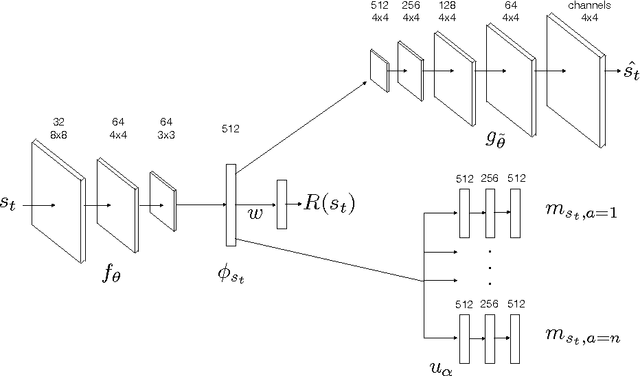
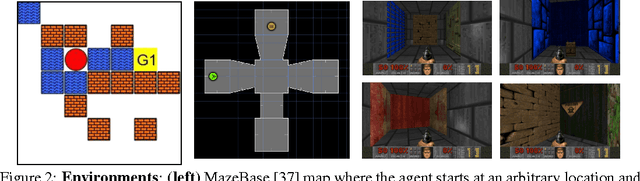
Learning robust value functions given raw observations and rewards is now possible with model-free and model-based deep reinforcement learning algorithms. There is a third alternative, called Successor Representations (SR), which decomposes the value function into two components -- a reward predictor and a successor map. The successor map represents the expected future state occupancy from any given state and the reward predictor maps states to scalar rewards. The value function of a state can be computed as the inner product between the successor map and the reward weights. In this paper, we present DSR, which generalizes SR within an end-to-end deep reinforcement learning framework. DSR has several appealing properties including: increased sensitivity to distal reward changes due to factorization of reward and world dynamics, and the ability to extract bottleneck states (subgoals) given successor maps trained under a random policy. We show the efficacy of our approach on two diverse environments given raw pixel observations -- simple grid-world domains (MazeBase) and the Doom game engine.