 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInverse Graphics with Probabilistic CAD Models
Paper and Code
Jul 04, 2014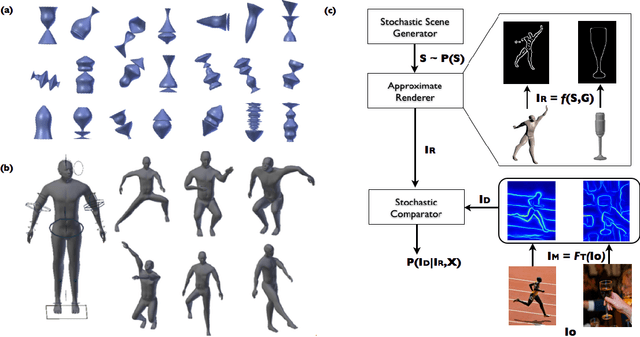
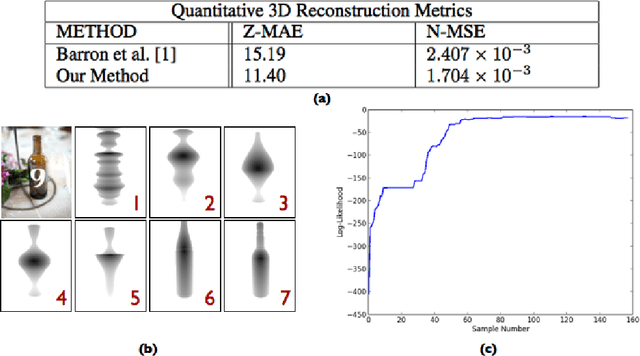
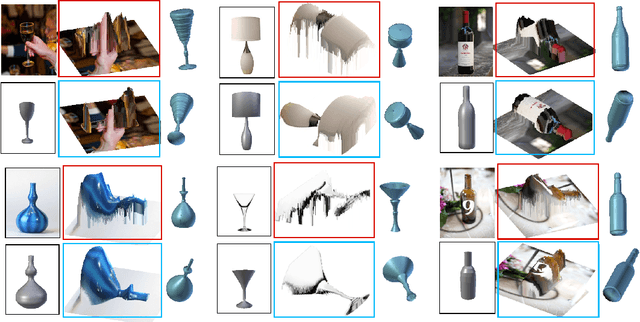
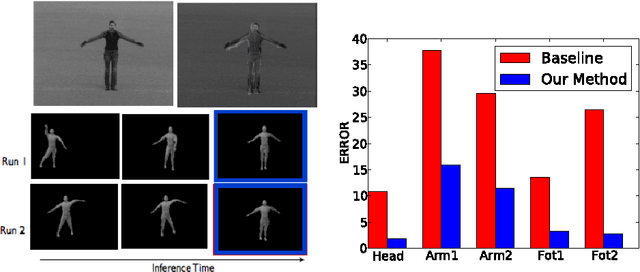
Recently, multiple formulations of vision problems as probabilistic inversions of generative models based on computer graphics have been proposed. However, applications to 3D perception from natural images have focused on low-dimensional latent scenes, due to challenges in both modeling and inference. Accounting for the enormous variability in 3D object shape and 2D appearance via realistic generative models seems intractable, as does inverting even simple versions of the many-to-many computations that link 3D scenes to 2D images. This paper proposes and evaluates an approach that addresses key aspects of both these challenges. We show that it is possible to solve challenging, real-world 3D vision problems by approximate inference in generative models for images based on rendering the outputs of probabilistic CAD (PCAD) programs. Our PCAD object geometry priors generate deformable 3D meshes corresponding to plausible objects and apply affine transformations to place them in a scene. Image likelihoods are based on similarity in a feature space based on standard mid-level image representations from the vision literature. Our inference algorithm integrates single-site and locally blocked Metropolis-Hastings proposals, Hamiltonian Monte Carlo and discriminative data-driven proposals learned from training data generated from our models. We apply this approach to 3D human pose estimation and object shape reconstruction from single images, achieving quantitative and qualitative performance improvements over state-of-the-art baselines.