 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline-Online Learning of Deformation Model for Cable Manipulation with Graph Neural Networks
Mar 28, 2022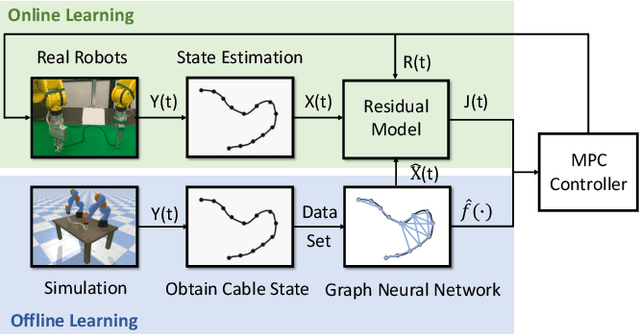
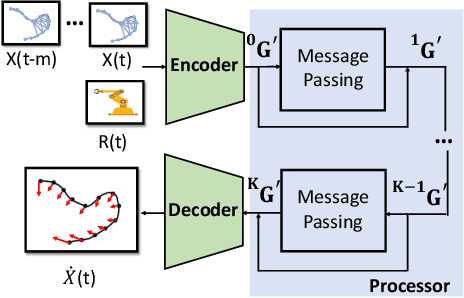
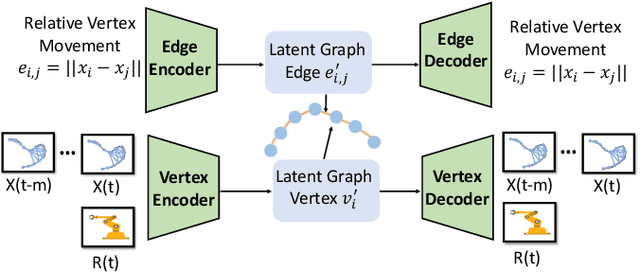
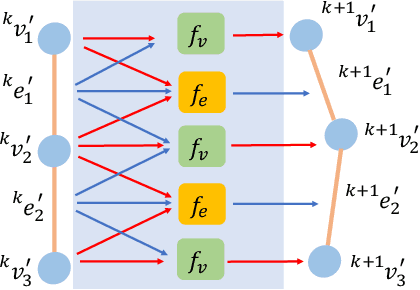
Manipulating deformable linear objects by robots has a wide range of applications, e.g., manufacturing and medical surgery. To complete such tasks, an accurate dynamics model for predicting the deformation is critical for robust control. In this work, we deal with this challenge by proposing a hybrid offline-online method to learn the dynamics of cables in a robust and data-efficient manner. In the offline phase, we adopt Graph Neural Network (GNN) to learn the deformation dynamics purely from the simulation data. Then a linear residual model is learned in real-time to bridge the sim-to-real gap. The learned model is then utilized as the dynamics constraint of a trust region based Model Predictive Controller (MPC) to calculate the optimal robot movements. The online learning and MPC run in a closed-loop manner to robustly accomplish the task. Finally, comparative results with existing methods are provided to quantitatively show the effectiveness and robustness.
A Learning Framework for Robust Bin Picking by Customized Grippers
Mar 05, 2019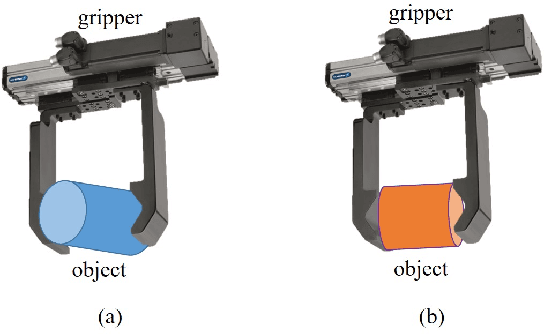
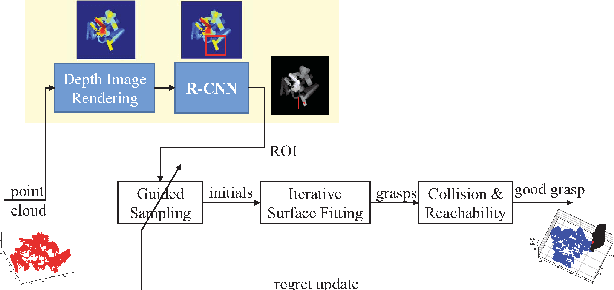
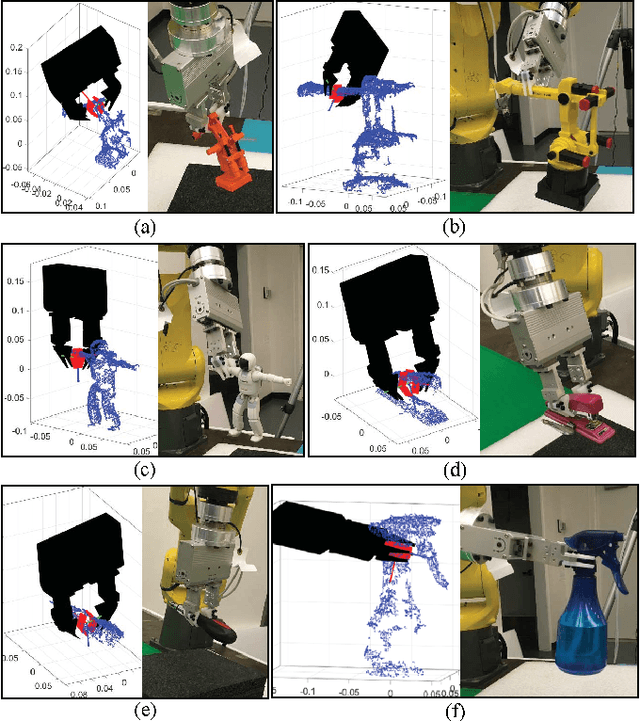
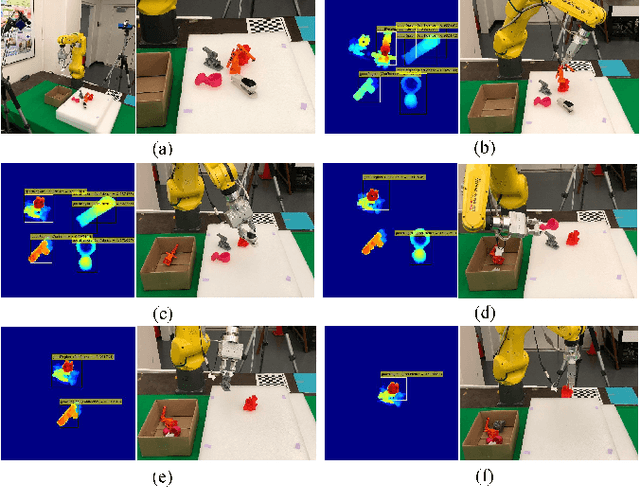
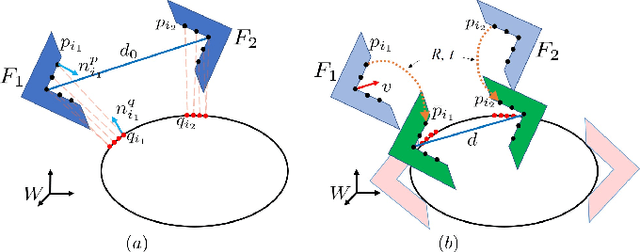
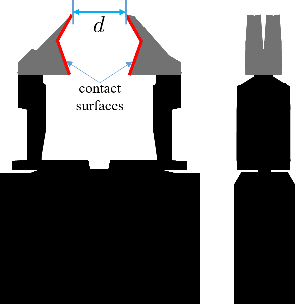
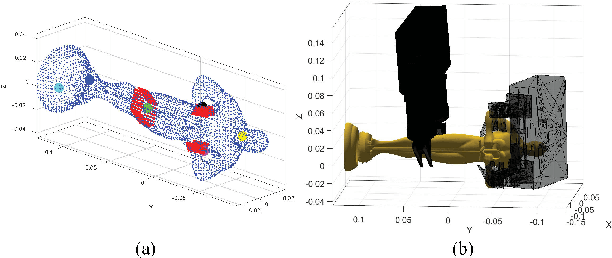
Customized grippers have specifically designed fingers to increase the contact area with the workpieces and improve the grasp robustness. However, grasp planning for customized grippers is challenging due to the object variations, surface contacts and structural constraints of the grippers. In this paper, we propose a learning framework to plan robust grasps for customized grippers in real-time. The learning framework contains a low-level optimization-based planner to search for optimal grasps locally under object shape variations, and a high-level learning-based explorer to learn the grasp exploration based on previous grasp experience. The optimization-based planner uses an iterative surface fitting (ISF) to simultaneously search for optimal gripper transformation and finger displacement by minimizing the surface fitting error. The high-level learning-based explorer trains a region-based convolutional neural network (R-CNN) to propose good optimization regions, which avoids ISF getting stuck in bad local optima and improves the collision avoidance performance. The proposed learning framework with RCNN-ISF is able to consider the structural constraints of the gripper, learn grasp exploration strategy from previous experience, and plan optimal grasps in clutter environment in real-time. The effectiveness of the algorithm is verified by experiments.
Learn the Manipulation of Deformable Objects Using Tangent Space Point Set Registration
Oct 09, 2018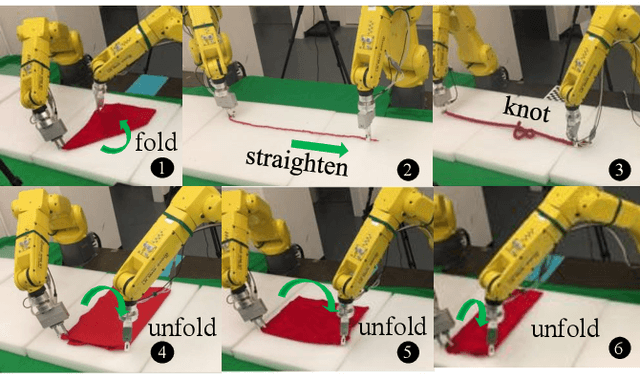
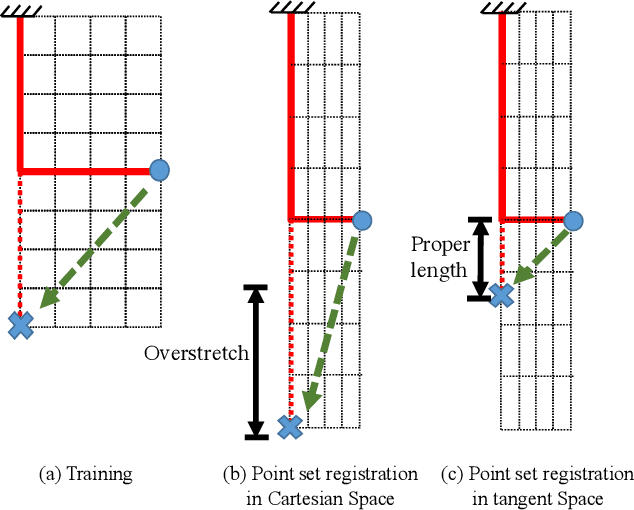
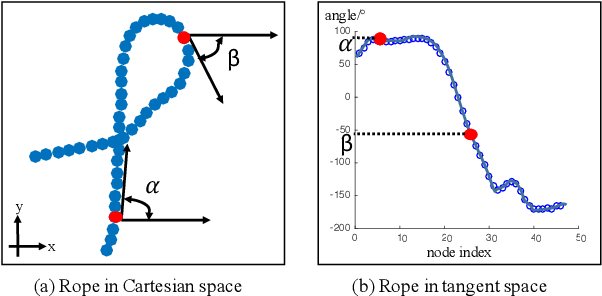
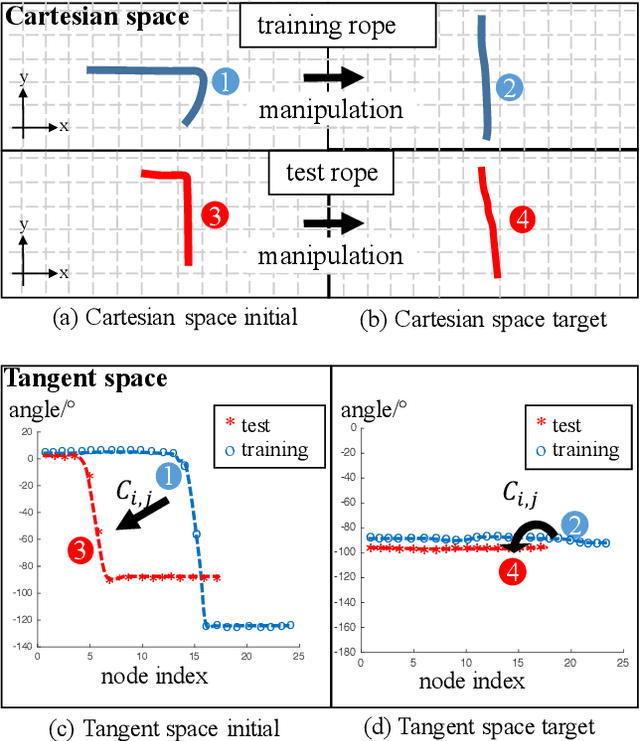
Point set registration is a powerful method that enables robots to manipulate deformable objects. By mapping the point cloud of the current object to the pre-trained point cloud, a transformation function can be constructed. The manipulator's trajectory for pre-trained shapes can be warped with this transformation function, yielding a feasible trajectory for the new shape. However, usually this transformation function regards objects as discrete points, and dismisses the topological structures. Therefore, it risks over-stretching or over-compression during manipulation. To tackle this problem, this paper proposes a tangent space point set registration method. A tangent space representation of an object is constructed by defining an angle for each node on the object. Point set registration algorithm runs in this newly-constructed tangent space, yielding a tangent space trajectory. The trajectory is then converted back to Cartesian space and carried out by the robot. Compared to its counterpart in Cartesian space, tangent space point set registration is safer and more robust, succeeding in a series of experiments such as rope straightening, rope knotting, cloth folding and unfolding.
SERoCS: Safe and Efficient Robot Collaborative Systems for Next Generation Intelligent Industrial Co-Robots
Sep 21, 2018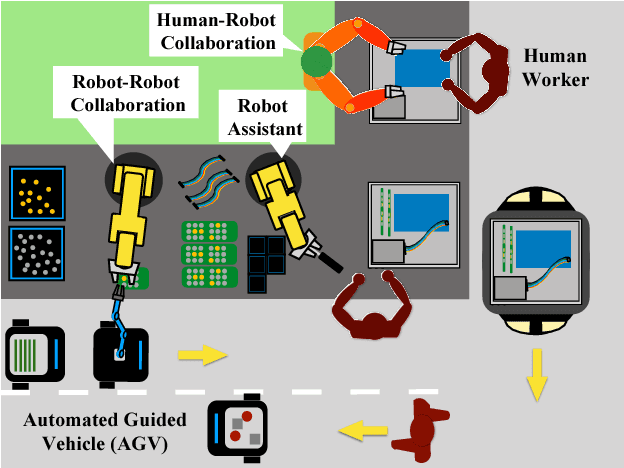
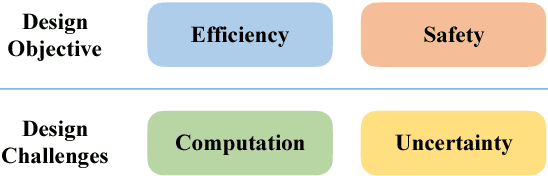
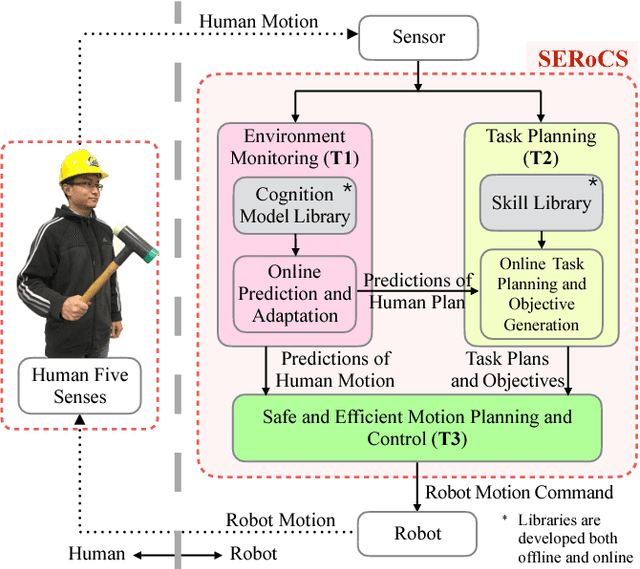
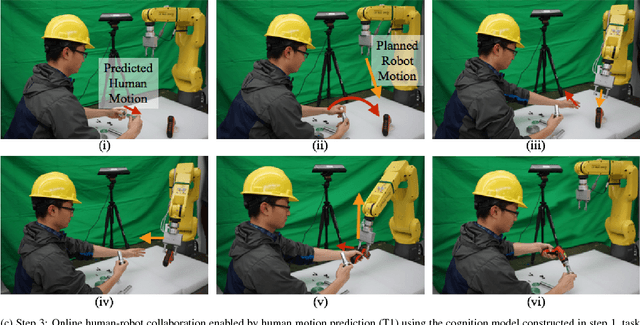
Human-robot collaborations have been recognized as an essential component for future factories. It remains challenging to properly design the behavior of those co-robots. Those robots operate in dynamic uncertain environment with limited computation capacity. The design objective is to maximize their task efficiency while guaranteeing safety. This paper discusses a set of design principles of a safe and efficient robot collaboration system (SERoCS) for the next generation co-robots, which consists of robust cognition algorithms for environment monitoring, efficient task planning algorithms for reference generations, and safe motion planning and control algorithms for safe human-robot interactions. The proposed SERoCS will address the design challenges and significantly expand the skill sets of the co-robots to allow them to work safely and efficiently with their human counterparts. The development of SERoCS will create a significant advancement toward adoption of co-robots in various industries. The experiments validate the effectiveness of SERoCS.
Grasp Planning for Customized Grippers by Iterative Surface Fitting
Jul 28, 2018
Customized grippers have broad applications in industrial assembly lines. Compared with general parallel grippers, the customized grippers have specifically designed fingers to increase the contact area with the workpieces and improve the grasp robustness. However, grasp planning for customized grippers is challenging due to the object variations, surface contacts and structural constraints of the grippers. In this paper, an iterative surface fitting (ISF) algorithm is proposed to plan grasps for customized grippers. ISF simultaneously searches for optimal gripper transformation and finger displacement by minimizing the surface fitting error. A guided sampling is introduced to avoid ISF getting stuck in local optima and improve the collision avoidance performance. The proposed algorithm is able to consider the structural constraints of the gripper and plan optimal grasps in real-time. The effectiveness of the algorithm is verified by both simulations and experiments. The experimental videos are available at: http://me.berkeley.edu/\%7Eyongxiangfan/CASE2018/caseisf.html
Real-Time Grasp Planning for Multi-Fingered Hands by Finger Splitting
Jul 28, 2018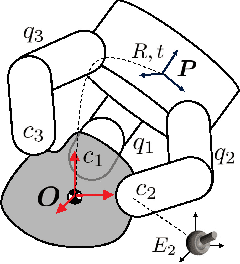
Grasp planning for multi-fingered hands is computationally expensive due to the joint-contact coupling, surface nonlinearities and high dimensionality, thus is generally not affordable for real-time implementations. Traditional planning methods by optimization, sampling or learning work well in planning for parallel grippers but remain challenging for multi-fingered hands. This paper proposes a strategy called finger splitting, to plan precision grasps for multi-fingered hands starting from optimal parallel grasps. The finger splitting is optimized by a dual-stage iterative optimization including a contact point optimization (CPO) and a palm pose optimization (PPO), to gradually split fingers and adjust both the contact points and the palm pose. The dual-stage optimization is able to consider both the object grasp quality and hand manipulability, address the nonlinearities and coupling, and achieve efficient convergence within one second. Simulation results demonstrate the effectiveness of the proposed approach. The simulation video is available at: http://me.berkeley.edu/\%7Eyongxiangfan/IROS2018/fingersplit.html
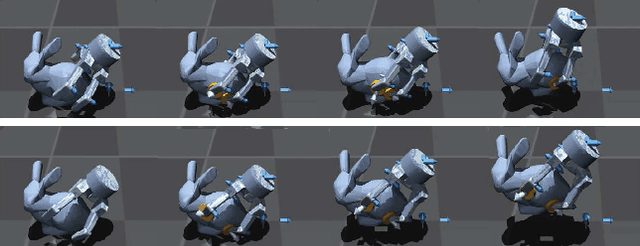
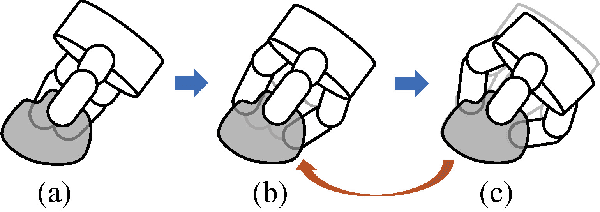
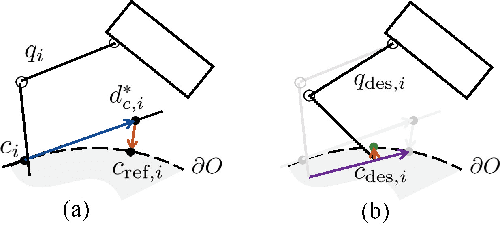
Real-Time Robust Finger Gaits Planning under Object Shape and Dynamics Uncertainties
Oct 27, 2017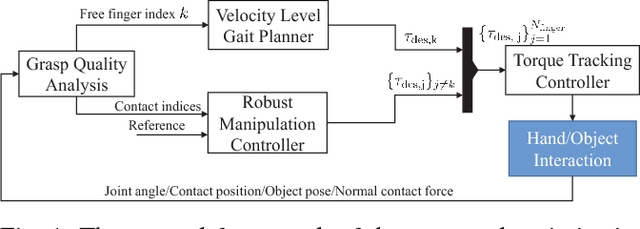
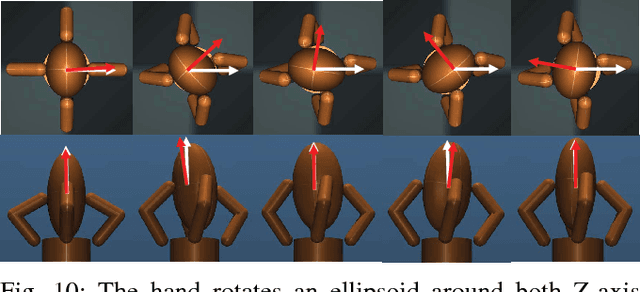
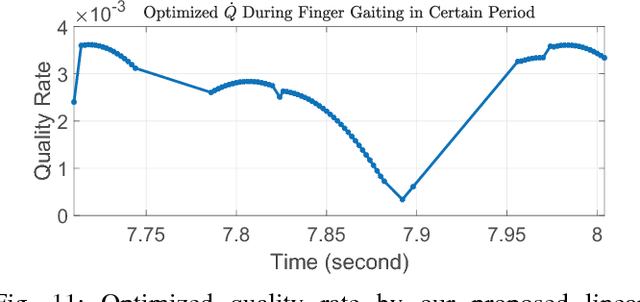
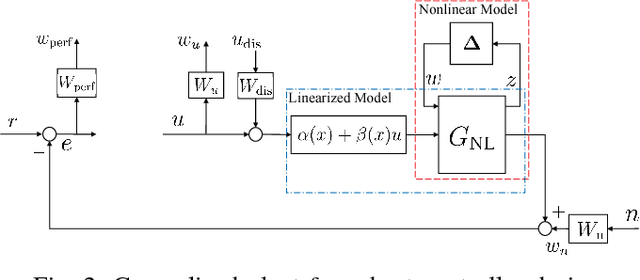
Dexterous manipulation has broad applications in assembly lines, warehouses and agriculture. To perform large-scale manipulation tasks for various objects, a multi-fingered robotic hand sometimes has to sequentially adjust its grasping gestures, i.e. the finger gaits, to address the workspace limits and guarantee the object stability. However, realizing finger gaits planning in dexterous manipulation is challenging due to the complicated grasp quality metrics, uncertainties on object shapes and dynamics (mass and moment of inertia), and unexpected slippage under uncertain contact dynamics. In this paper, a dual-stage optimization based planner is proposed to handle these challenges. In the first stage, a velocity-level finger gaits planner is introduced by combining object grasp quality with hand manipulability. The proposed finger gaits planner is computationally efficient and realizes finger gaiting without 3D model of the object. In the second stage, a robust manipulation controller using robust control and force optimization is proposed to address object dynamics uncertainties and external disturbances. The dual-stage planner is able to guarantee stability under unexpected slippage caused by uncertain contact dynamics. Moreover, it does not require velocity measurement or expensive 3D/6D tactile sensors. The proposed dual-stage optimization based planner is verified by simulations on Mujoco.