 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp Planning for Customized Grippers by Iterative Surface Fitting
Paper and Code
Jul 28, 2018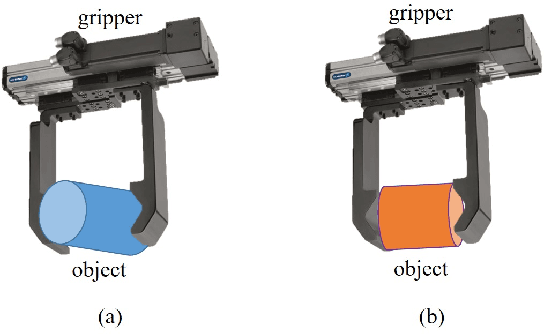
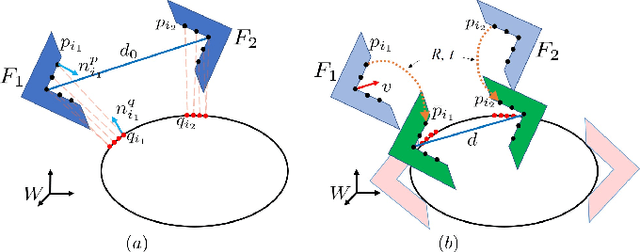
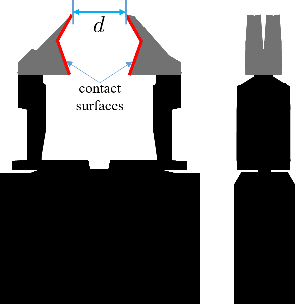
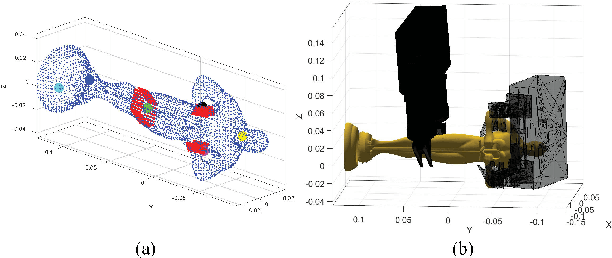
Customized grippers have broad applications in industrial assembly lines. Compared with general parallel grippers, the customized grippers have specifically designed fingers to increase the contact area with the workpieces and improve the grasp robustness. However, grasp planning for customized grippers is challenging due to the object variations, surface contacts and structural constraints of the grippers. In this paper, an iterative surface fitting (ISF) algorithm is proposed to plan grasps for customized grippers. ISF simultaneously searches for optimal gripper transformation and finger displacement by minimizing the surface fitting error. A guided sampling is introduced to avoid ISF getting stuck in local optima and improve the collision avoidance performance. The proposed algorithm is able to consider the structural constraints of the gripper and plan optimal grasps in real-time. The effectiveness of the algorithm is verified by both simulations and experiments. The experimental videos are available at: http://me.berkeley.edu/\%7Eyongxiangfan/CASE2018/caseisf.html