 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Task Planning for Assembly Lines with Human-Robot Collaboration
Apr 17, 2022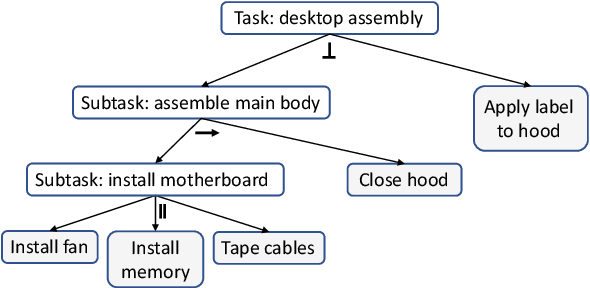
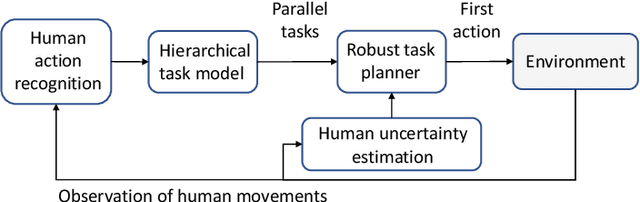
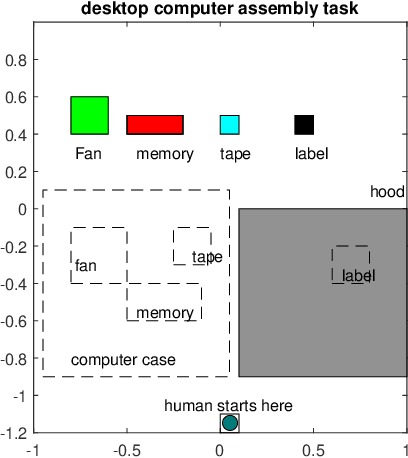
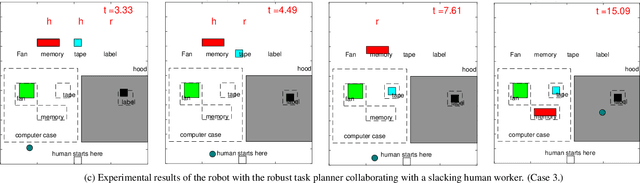
Efficient and robust task planning for a human-robot collaboration (HRC) system remains challenging. The human-aware task planner needs to assign jobs to both robots and human workers so that they can work collaboratively to achieve better time efficiency. However, the complexity of the tasks and the stochastic nature of the human collaborators bring challenges to such task planning. To reduce the complexity of the planning problem, we utilize the hierarchical task model, which explicitly captures the sequential and parallel relationships of the task. We model human movements with the sigma-lognormal functions to account for human-induced uncertainties. A human action model adaptation scheme is applied during run-time, and it provides a measure for modeling the human-induced uncertainties. We propose a sampling-based method to estimate human job completion time uncertainties. Next, we propose a robust task planner, which formulates the planning problem as a robust optimization problem by considering the task structure and the uncertainties. We conduct simulations of a robot arm collaborating with a human worker in an electronics assembly setting. The results show that our proposed planner can reduce task completion time when human-induced uncertainties occur compared to the baseline planner.
Towards Better Human Robot Collaboration with Robust Plan Recognition and Trajectory Prediction
Mar 20, 2019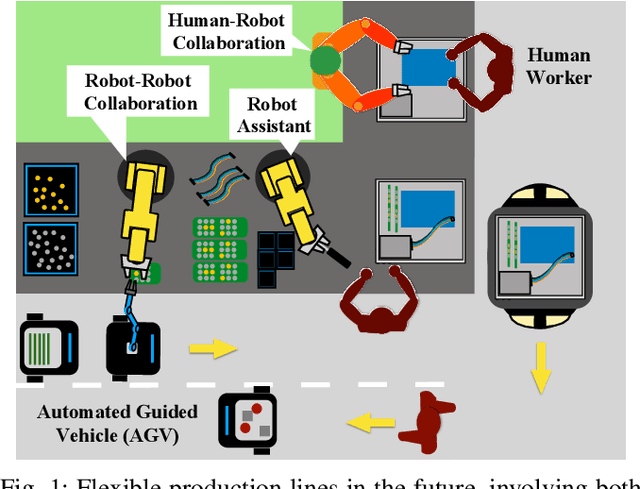
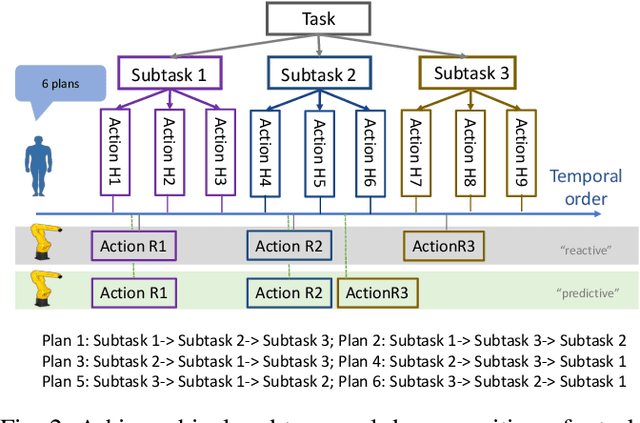
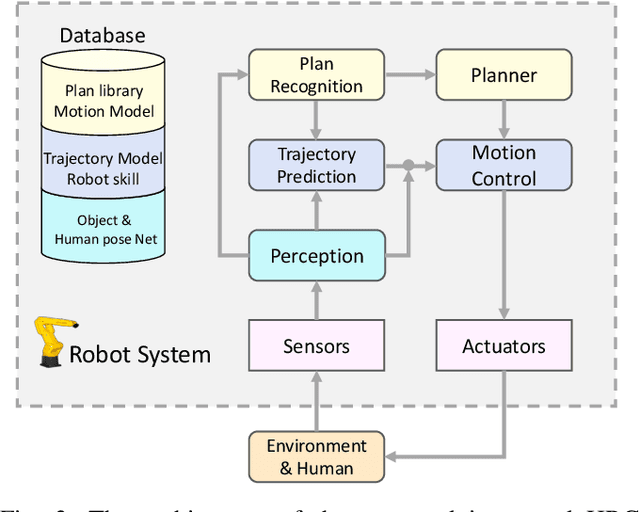

Human robot collaboration (HRC) is becoming increasingly important as the paradigm of manufacturing is shifting from mass production to mass customization. The introduction of HRC can significantly improve the flexibility and intelligence of automation. However, due to the stochastic and time-varying nature of human collaborators, it is challenging for the robot to efficiently and accurately identify the plan of human and respond in a safe manner. To address this challenge, we propose an integrated human robot collaboration framework in this paper which includes both plan recognition and trajectory prediction. Such a framework enables the robots to perceive, predict and adapt their actions to the human's plan and intelligently avoid collisions with the human based on the predicted human trajectory. Moreover, by explicitly leveraging the hierarchical relationship between the plan and trajectories, more robust plan recognition performance can be achieved. Experiments are conducted on an industrial robot to verify the proposed framework, which shows that our proposed framework can not only assure safe HRC, but also improve the time efficiency of the HRC team, and the plan recognition module is not sensitive to noises.
Human Motion Prediction using Adaptable Neural Networks
Oct 01, 2018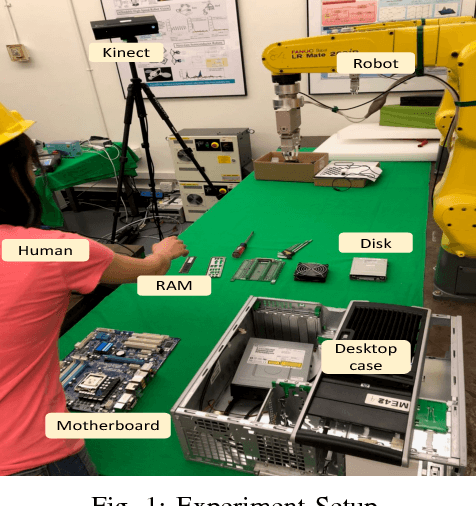
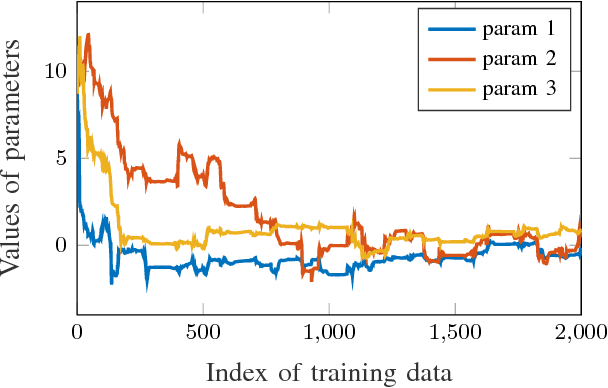
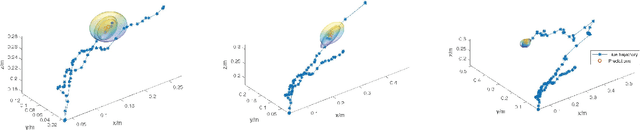
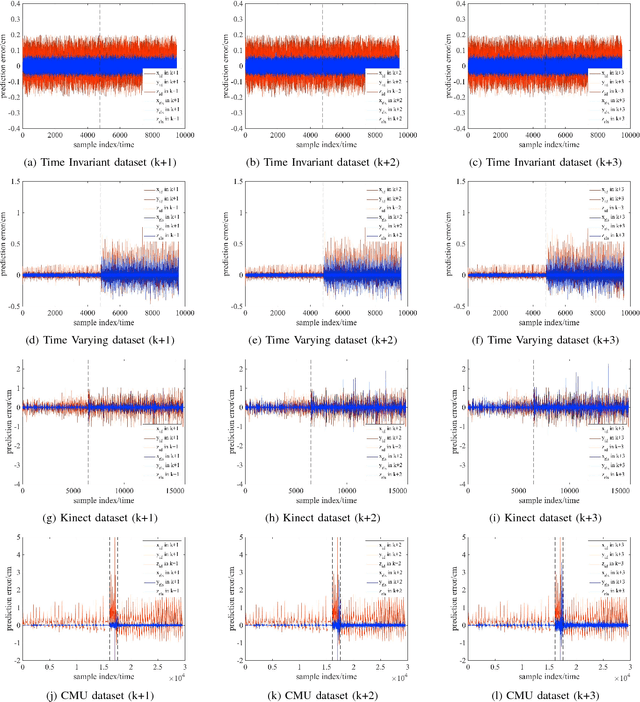
Human motion prediction is an important component to facilitate human robot interaction. Robots need to accurately predict human's future movement in order to efficiently collaborate with humans, as well as to safely plan its own motion trajectories. Many recent approaches predict human's future movement using deep learning methods, such as recurrent neural networks. However, existing methods lack the ability to adapt to time-varying human behaviors. Moreover, many of them do not quantify uncertainties in the prediction. This paper proposes a new approach that uses an adaptable neural network for human motion prediction, in order to accommodate human's time-varying behaviors and to provide uncertainty bounds of the predictions in real time. In particular, a neural network is trained offline to represent the human motion transition model. Recursive least square parameter adaptation algorithm (RLS-PAA) is adopted for online parameter adaptation of the neural network and for uncertainty estimation. Experiments on several human motion datasets verify that the proposed method outperforms the state-of-the-art approach with a significant improvement in terms of prediction accuracy and computation efficiency.
SERoCS: Safe and Efficient Robot Collaborative Systems for Next Generation Intelligent Industrial Co-Robots
Sep 21, 2018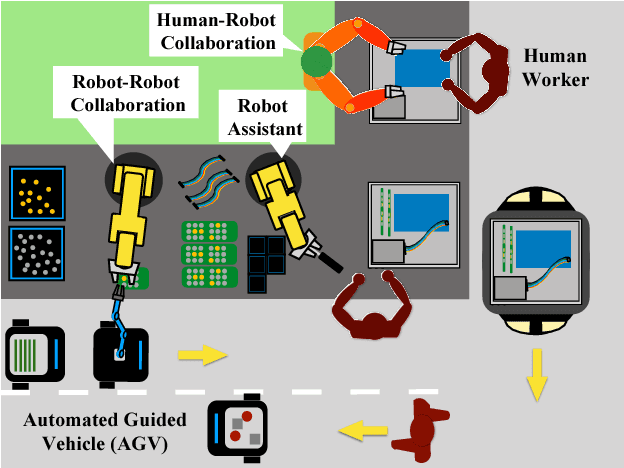
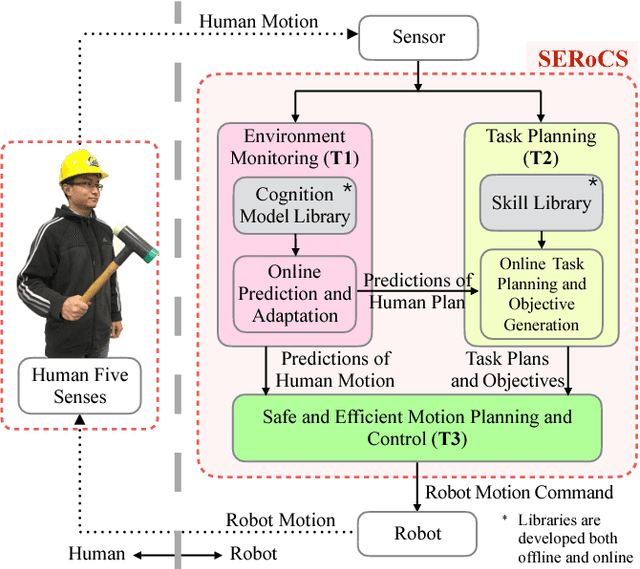
Human-robot collaborations have been recognized as an essential component for future factories. It remains challenging to properly design the behavior of those co-robots. Those robots operate in dynamic uncertain environment with limited computation capacity. The design objective is to maximize their task efficiency while guaranteeing safety. This paper discusses a set of design principles of a safe and efficient robot collaboration system (SERoCS) for the next generation co-robots, which consists of robust cognition algorithms for environment monitoring, efficient task planning algorithms for reference generations, and safe motion planning and control algorithms for safe human-robot interactions. The proposed SERoCS will address the design challenges and significantly expand the skill sets of the co-robots to allow them to work safely and efficiently with their human counterparts. The development of SERoCS will create a significant advancement toward adoption of co-robots in various industries. The experiments validate the effectiveness of SERoCS.