 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Motion Prediction using Adaptable Neural Networks
Paper and Code
Oct 01, 2018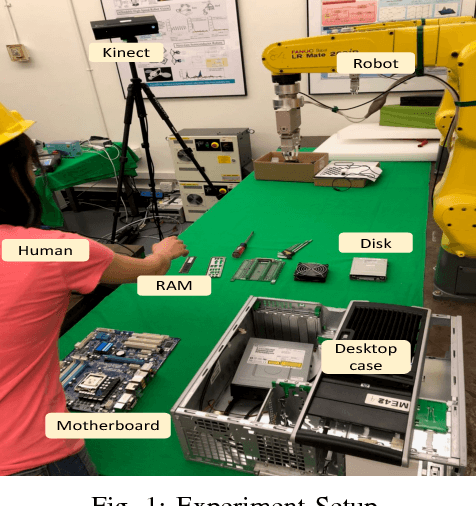
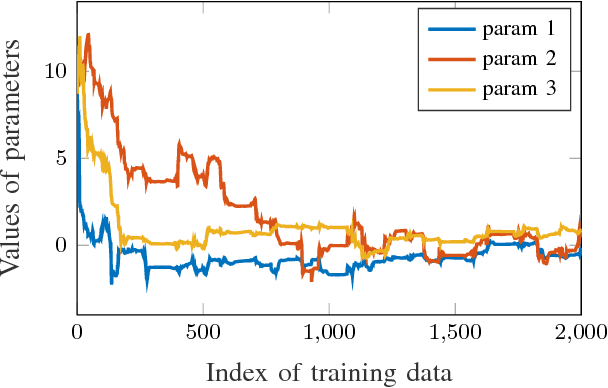
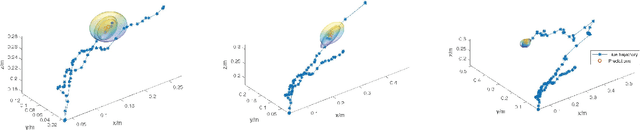
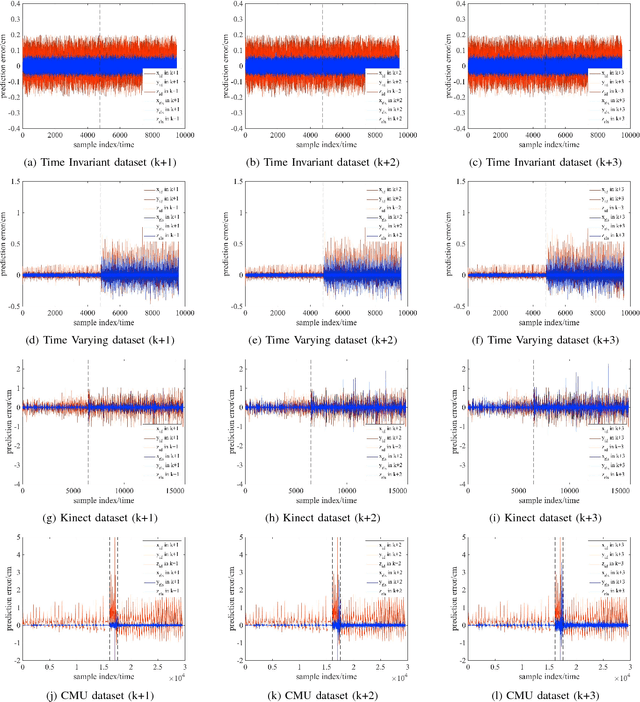
Human motion prediction is an important component to facilitate human robot interaction. Robots need to accurately predict human's future movement in order to efficiently collaborate with humans, as well as to safely plan its own motion trajectories. Many recent approaches predict human's future movement using deep learning methods, such as recurrent neural networks. However, existing methods lack the ability to adapt to time-varying human behaviors. Moreover, many of them do not quantify uncertainties in the prediction. This paper proposes a new approach that uses an adaptable neural network for human motion prediction, in order to accommodate human's time-varying behaviors and to provide uncertainty bounds of the predictions in real time. In particular, a neural network is trained offline to represent the human motion transition model. Recursive least square parameter adaptation algorithm (RLS-PAA) is adopted for online parameter adaptation of the neural network and for uncertainty estimation. Experiments on several human motion datasets verify that the proposed method outperforms the state-of-the-art approach with a significant improvement in terms of prediction accuracy and computation efficiency.