 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMerlin: Multi-View Representation Learning for Robust Multivariate Time Series Forecasting with Unfixed Missing Rates
Jun 14, 2025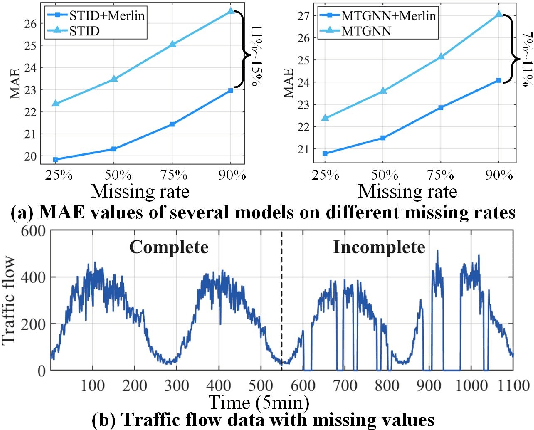
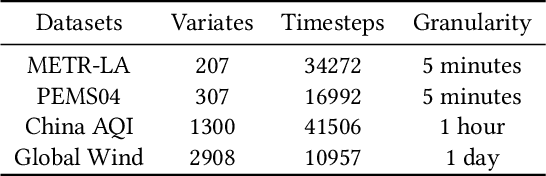
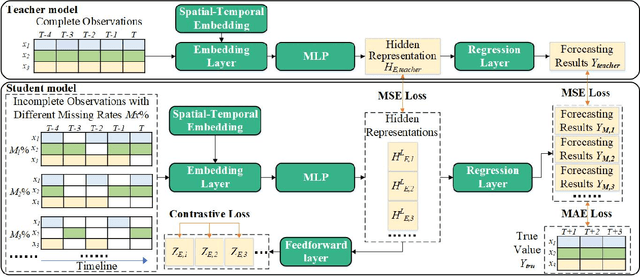
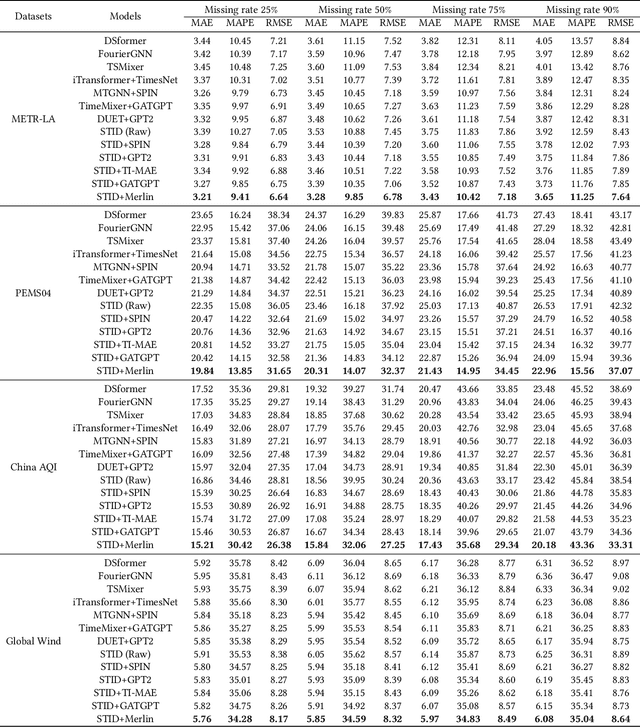
Multivariate Time Series Forecasting (MTSF) involves predicting future values of multiple interrelated time series. Recently, deep learning-based MTSF models have gained significant attention for their promising ability to mine semantics (global and local information) within MTS data. However, these models are pervasively susceptible to missing values caused by malfunctioning data collectors. These missing values not only disrupt the semantics of MTS, but their distribution also changes over time. Nevertheless, existing models lack robustness to such issues, leading to suboptimal forecasting performance. To this end, in this paper, we propose Multi-View Representation Learning (Merlin), which can help existing models achieve semantic alignment between incomplete observations with different missing rates and complete observations in MTS. Specifically, Merlin consists of two key modules: offline knowledge distillation and multi-view contrastive learning. The former utilizes a teacher model to guide a student model in mining semantics from incomplete observations, similar to those obtainable from complete observations. The latter improves the student model's robustness by learning from positive/negative data pairs constructed from incomplete observations with different missing rates, ensuring semantic alignment across different missing rates. Therefore, Merlin is capable of effectively enhancing the robustness of existing models against unfixed missing rates while preserving forecasting accuracy. Experiments on four real-world datasets demonstrate the superiority of Merlin.
BLAST: Balanced Sampling Time Series Corpus for Universal Forecasting Models
May 23, 2025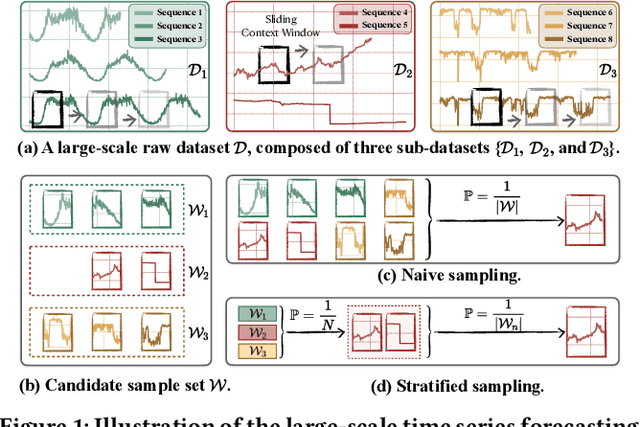
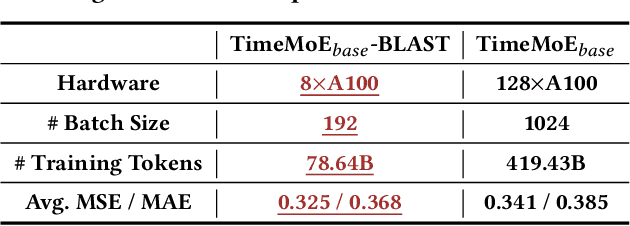
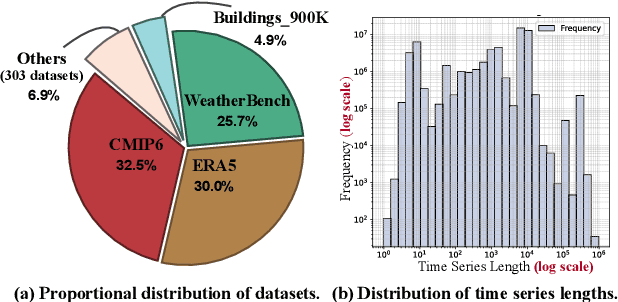
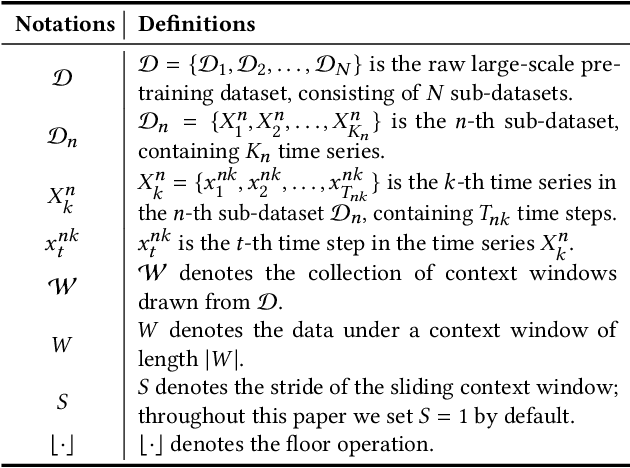
The advent of universal time series forecasting models has revolutionized zero-shot forecasting across diverse domains, yet the critical role of data diversity in training these models remains underexplored. Existing large-scale time series datasets often suffer from inherent biases and imbalanced distributions, leading to suboptimal model performance and generalization. To address this gap, we introduce BLAST, a novel pre-training corpus designed to enhance data diversity through a balanced sampling strategy. First, BLAST incorporates 321 billion observations from publicly available datasets and employs a comprehensive suite of statistical metrics to characterize time series patterns. Then, to facilitate pattern-oriented sampling, the data is implicitly clustered using grid-based partitioning. Furthermore, by integrating grid sampling and grid mixup techniques, BLAST ensures a balanced and representative coverage of diverse patterns. Experimental results demonstrate that models pre-trained on BLAST achieve state-of-the-art performance with a fraction of the computational resources and training tokens required by existing methods. Our findings highlight the pivotal role of data diversity in improving both training efficiency and model performance for the universal forecasting task.
Context-Enhanced Multi-View Trajectory Representation Learning: Bridging the Gap through Self-Supervised Models
Oct 17, 2024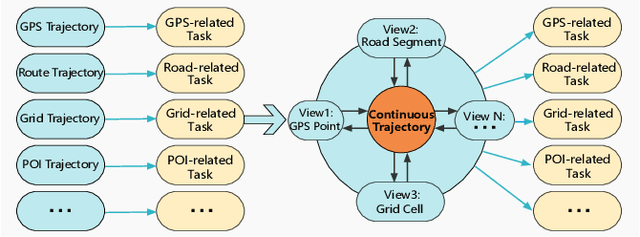
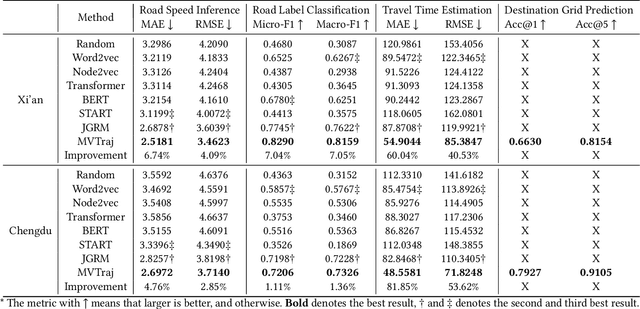
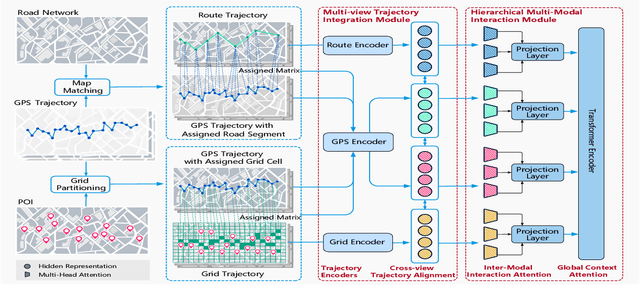

Modeling trajectory data with generic-purpose dense representations has become a prevalent paradigm for various downstream applications, such as trajectory classification, travel time estimation and similarity computation. However, existing methods typically rely on trajectories from a single spatial view, limiting their ability to capture the rich contextual information that is crucial for gaining deeper insights into movement patterns across different geospatial contexts. To this end, we propose MVTraj, a novel multi-view modeling method for trajectory representation learning. MVTraj integrates diverse contextual knowledge, from GPS to road network and points-of-interest to provide a more comprehensive understanding of trajectory data. To align the learning process across multiple views, we utilize GPS trajectories as a bridge and employ self-supervised pretext tasks to capture and distinguish movement patterns across different spatial views. Following this, we treat trajectories from different views as distinct modalities and apply a hierarchical cross-modal interaction module to fuse the representations, thereby enriching the knowledge derived from multiple sources. Extensive experiments on real-world datasets demonstrate that MVTraj significantly outperforms existing baselines in tasks associated with various spatial views, validating its effectiveness and practical utility in spatio-temporal modeling.
GinAR: An End-To-End Multivariate Time Series Forecasting Model Suitable for Variable Missing
May 18, 2024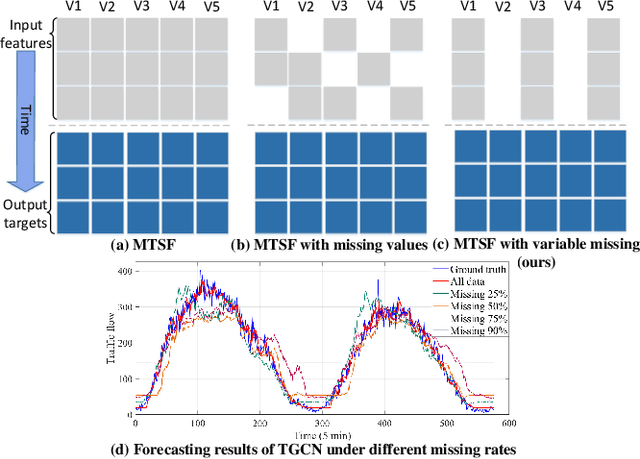
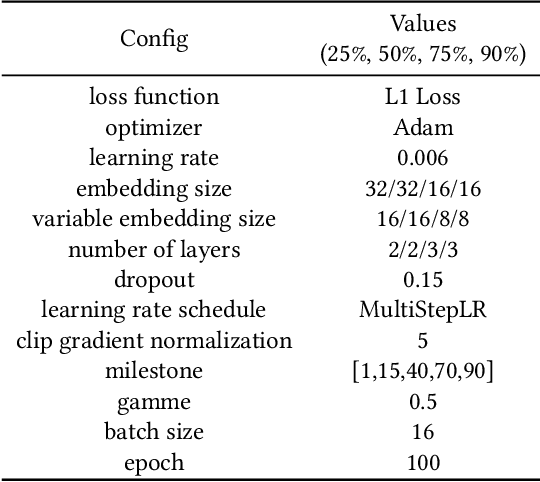
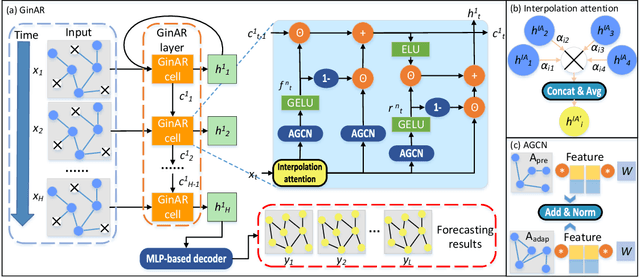
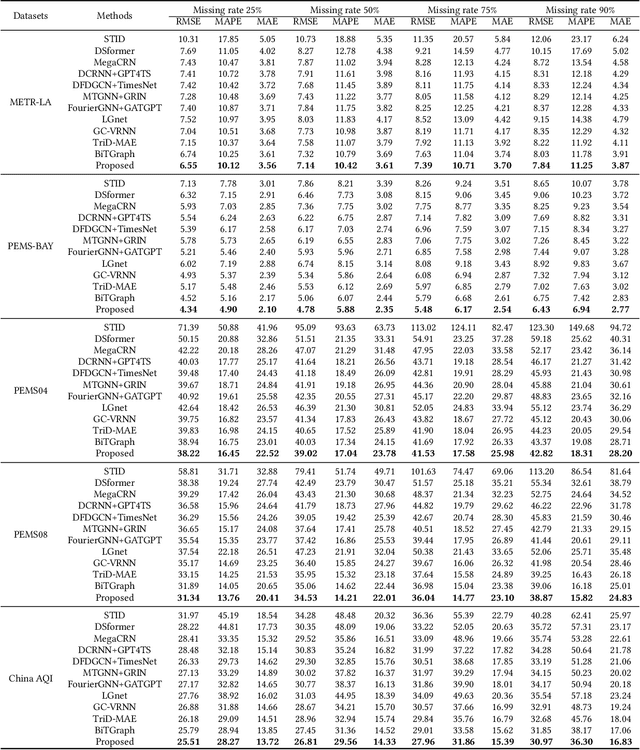
Multivariate time series forecasting (MTSF) is crucial for decision-making to precisely forecast the future values/trends, based on the complex relationships identified from historical observations of multiple sequences. Recently, Spatial-Temporal Graph Neural Networks (STGNNs) have gradually become the theme of MTSF model as their powerful capability in mining spatial-temporal dependencies, but almost of them heavily rely on the assumption of historical data integrity. In reality, due to factors such as data collector failures and time-consuming repairment, it is extremely challenging to collect the whole historical observations without missing any variable. In this case, STGNNs can only utilize a subset of normal variables and easily suffer from the incorrect spatial-temporal dependency modeling issue, resulting in the degradation of their forecasting performance. To address the problem, in this paper, we propose a novel Graph Interpolation Attention Recursive Network (named GinAR) to precisely model the spatial-temporal dependencies over the limited collected data for forecasting. In GinAR, it consists of two key components, that is, interpolation attention and adaptive graph convolution to take place of the fully connected layer of simple recursive units, and thus are capable of recovering all missing variables and reconstructing the correct spatial-temporal dependencies for recursively modeling of multivariate time series data, respectively. Extensive experiments conducted on five real-world datasets demonstrate that GinAR outperforms 11 SOTA baselines, and even when 90% of variables are missing, it can still accurately predict the future values of all variables.
AdapTraj: A Multi-Source Domain Generalization Framework for Multi-Agent Trajectory Prediction
Dec 22, 2023
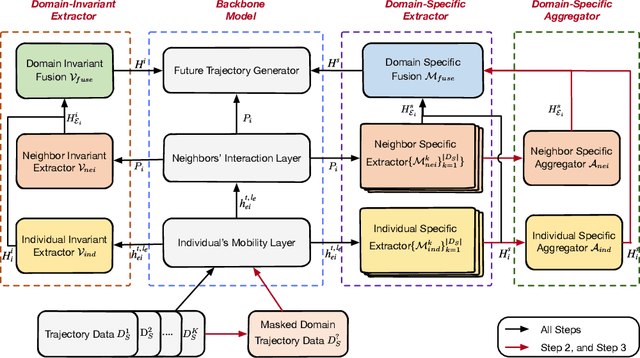


Multi-agent trajectory prediction, as a critical task in modeling complex interactions of objects in dynamic systems, has attracted significant research attention in recent years. Despite the promising advances, existing studies all follow the assumption that data distribution observed during model learning matches that encountered in real-world deployments. However, this assumption often does not hold in practice, as inherent distribution shifts might exist in the mobility patterns for deployment environments, thus leading to poor domain generalization and performance degradation. Consequently, it is appealing to leverage trajectories from multiple source domains to mitigate such discrepancies for multi-agent trajectory prediction task. However, the development of multi-source domain generalization in this task presents two notable issues: (1) negative transfer; (2) inadequate modeling for external factors. To address these issues, we propose a new causal formulation to explicitly model four types of features: domain-invariant and domain-specific features for both the focal agent and neighboring agents. Building upon the new formulation, we propose AdapTraj, a multi-source domain generalization framework specifically tailored for multi-agent trajectory prediction. AdapTraj serves as a plug-and-play module that is adaptable to a variety of models. Extensive experiments on four datasets with different domains demonstrate that AdapTraj consistently outperforms other baselines by a substantial margin.