 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Contamination Report from the 2024 CONDA Shared Task
Jul 31, 2024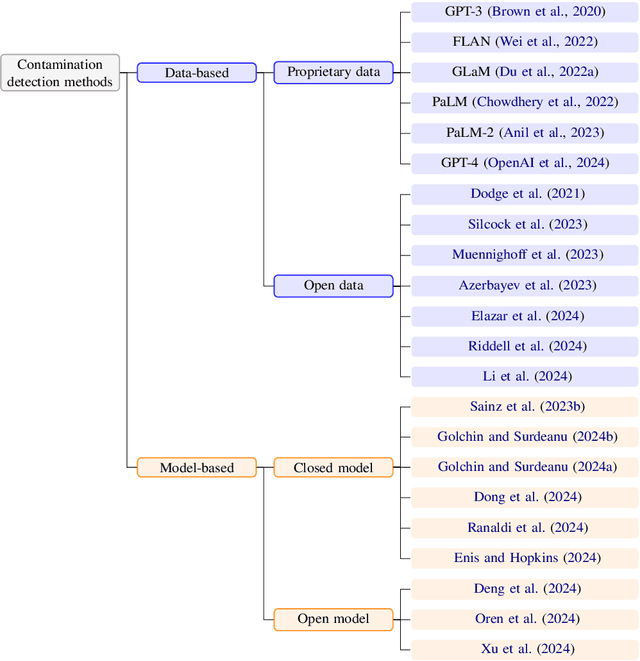
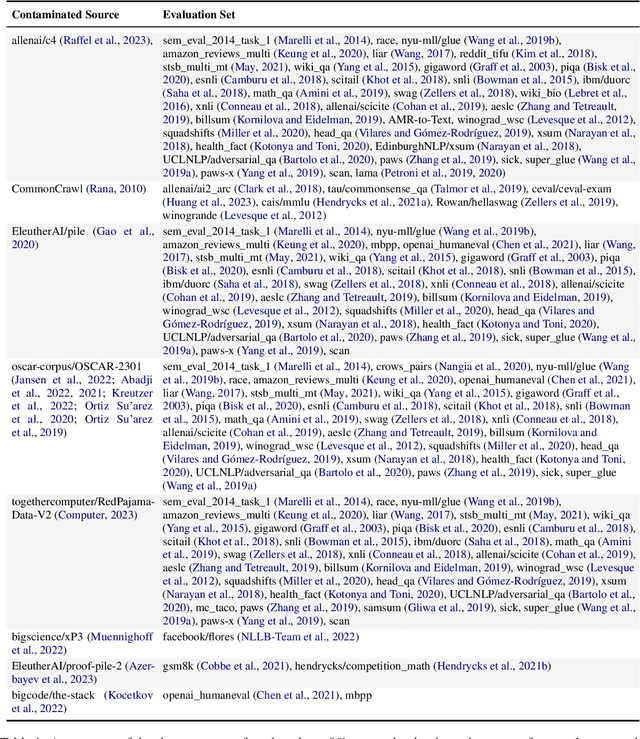
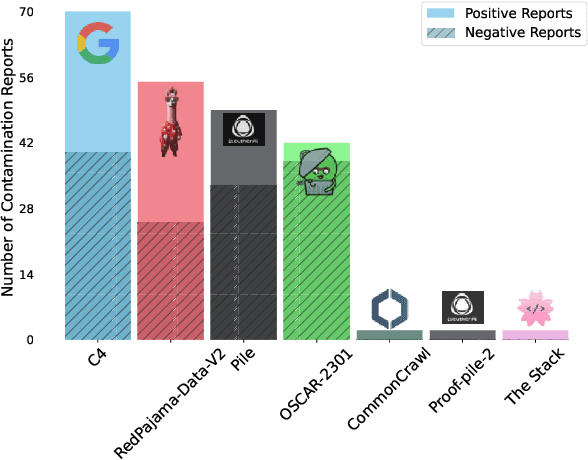
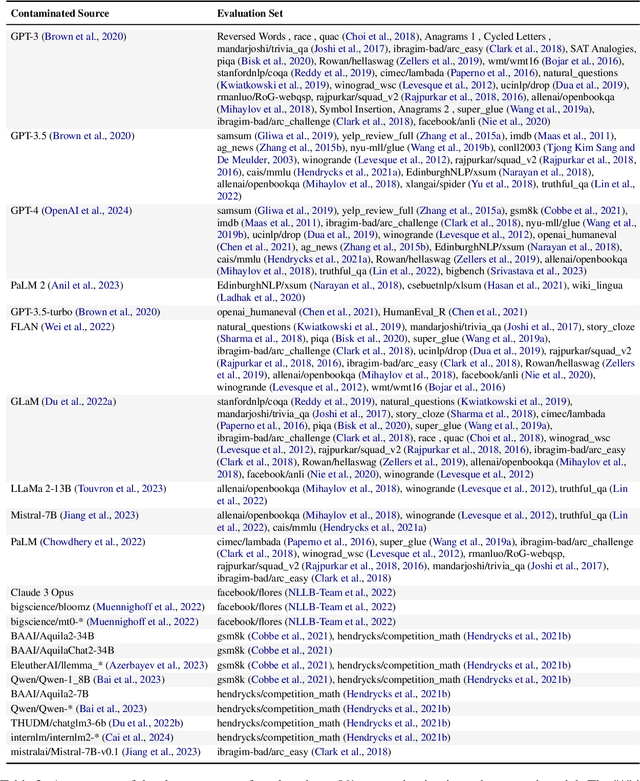
The 1st Workshop on Data Contamination (CONDA 2024) focuses on all relevant aspects of data contamination in natural language processing, where data contamination is understood as situations where evaluation data is included in pre-training corpora used to train large scale models, compromising evaluation results. The workshop fostered a shared task to collect evidence on data contamination in current available datasets and models. The goal of the shared task and associated database is to assist the community in understanding the extent of the problem and to assist researchers in avoiding reporting evaluation results on known contaminated resources. The shared task provides a structured, centralized public database for the collection of contamination evidence, open to contributions from the community via GitHub pool requests. This first compilation paper is based on 566 reported entries over 91 contaminated sources from a total of 23 contributors. The details of the individual contamination events are available in the platform. The platform continues to be online, open to contributions from the community.
Open Gimbal: A 3 Degrees of Freedom Open Source Sensing and Testing Platform for Nano and Micro UAVs
Oct 04, 2023



Testing the aerodynamics of micro- and nano-UAVs without actually flying is highly challenging. To address this issue, we introduce Open Gimbal, a specially designed 3 Degrees of Freedom platform that caters to the unique requirements of micro- and nano-UAVs. This platform allows for unrestricted and free rotational motion, enabling comprehensive experimentation and evaluation of these UAVs. Our approach focuses on simplicity and accessibility. We developed an open-source, 3D printable electro-mechanical design that has minimal size and low complexity. This design facilitates easy replication and customization, making it widely accessible to researchers and developers. Addressing the challenges of sensing flight dynamics at a small scale, we have devised an integrated wireless batteryless sensor subsystem. Our innovative solution eliminates the need for complex wiring and instead uses wireless power transfer for sensor data reception. To validate the effectiveness of open gimbal, we thoroughly evaluate and test its communication link and sensing performance using a typical nano-quadrotor. Through comprehensive testing, we verify the reliability and accuracy of open gimbal in real-world scenarios. These advancements provide valuable tools and insights for researchers and developers working with mUAVs and nUAVs, contributing to the progress of this rapidly evolving field.
* Link to open source repository: https://doi.org/10.5281/zenodo.8052218
BEAVIS: Balloon Enabled Aerial Vehicle for IoT and Sensing
Aug 02, 2023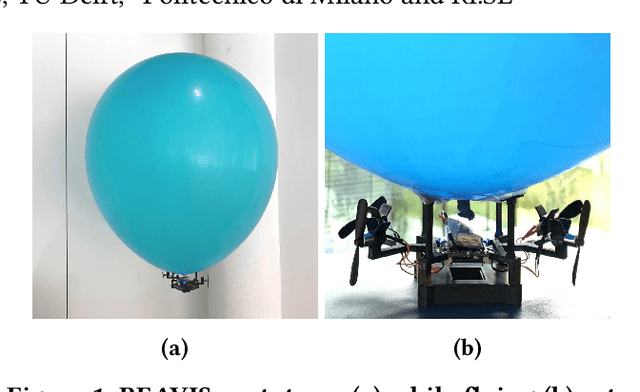
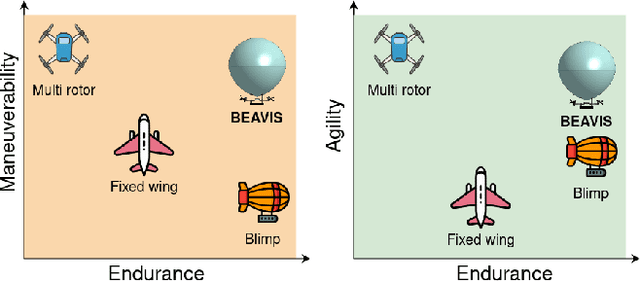
UAVs are becoming versatile and valuable platforms for various applications. However, the main limitation is their flying time. We present BEAVIS, a novel aerial robotic platform striking an unparalleled trade-off between the manoeuvrability of drones and the long lasting capacity of blimps. BEAVIS scores highly in applications where drones enjoy unconstrained mobility yet suffer from limited lifetime. A nonlinear flight controller exploiting novel, unexplored, aerodynamic phenomena to regulate the ambient pressure and enable all translational and yaw degrees of freedom is proposed without direct actuation in the vertical direction. BEAVIS has built-in rotor fault detection and tolerance. We explain the design and the necessary background in detail. We verify the dynamics of BEAVIS and demonstrate its distinct advantages, such as agility, over existing platforms including the degrees of freedom akin to a drone with 11.36x increased lifetime. We exemplify the potential of BEAVIS to become an invaluable platform for many applications.