 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen Gimbal: A 3 Degrees of Freedom Open Source Sensing and Testing Platform for Nano and Micro UAVs
Oct 04, 2023



Testing the aerodynamics of micro- and nano-UAVs without actually flying is highly challenging. To address this issue, we introduce Open Gimbal, a specially designed 3 Degrees of Freedom platform that caters to the unique requirements of micro- and nano-UAVs. This platform allows for unrestricted and free rotational motion, enabling comprehensive experimentation and evaluation of these UAVs. Our approach focuses on simplicity and accessibility. We developed an open-source, 3D printable electro-mechanical design that has minimal size and low complexity. This design facilitates easy replication and customization, making it widely accessible to researchers and developers. Addressing the challenges of sensing flight dynamics at a small scale, we have devised an integrated wireless batteryless sensor subsystem. Our innovative solution eliminates the need for complex wiring and instead uses wireless power transfer for sensor data reception. To validate the effectiveness of open gimbal, we thoroughly evaluate and test its communication link and sensing performance using a typical nano-quadrotor. Through comprehensive testing, we verify the reliability and accuracy of open gimbal in real-world scenarios. These advancements provide valuable tools and insights for researchers and developers working with mUAVs and nUAVs, contributing to the progress of this rapidly evolving field.
* Link to open source repository: https://doi.org/10.5281/zenodo.8052218
BEAVIS: Balloon Enabled Aerial Vehicle for IoT and Sensing
Aug 02, 2023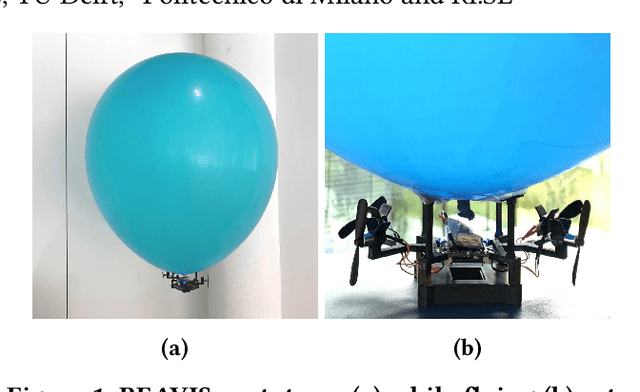
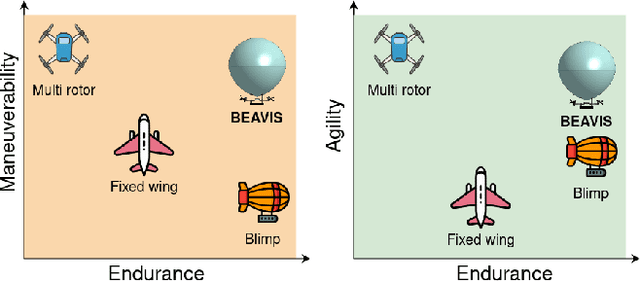
UAVs are becoming versatile and valuable platforms for various applications. However, the main limitation is their flying time. We present BEAVIS, a novel aerial robotic platform striking an unparalleled trade-off between the manoeuvrability of drones and the long lasting capacity of blimps. BEAVIS scores highly in applications where drones enjoy unconstrained mobility yet suffer from limited lifetime. A nonlinear flight controller exploiting novel, unexplored, aerodynamic phenomena to regulate the ambient pressure and enable all translational and yaw degrees of freedom is proposed without direct actuation in the vertical direction. BEAVIS has built-in rotor fault detection and tolerance. We explain the design and the necessary background in detail. We verify the dynamics of BEAVIS and demonstrate its distinct advantages, such as agility, over existing platforms including the degrees of freedom akin to a drone with 11.36x increased lifetime. We exemplify the potential of BEAVIS to become an invaluable platform for many applications.
FEEL: Fast, Energy-Efficient Localization for Autonomous Indoor Vehicles
Feb 01, 2021
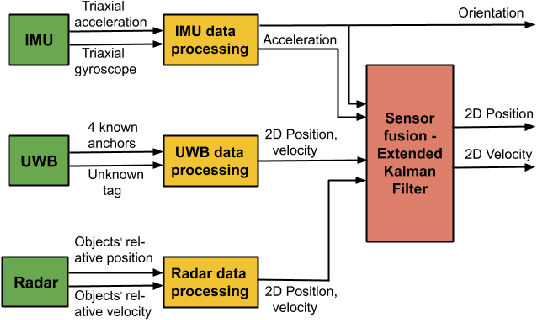


Autonomous vehicles have created a sensation in both outdoor and indoor applications. The famous indoor use-case is process automation inside a warehouse using Autonomous Indoor Vehicles (AIV). These vehicles need to locate themselves not only with an accuracy of a few centimetres but also within a few milliseconds in an energy-efficient manner. Due to these challenges, localization is a holy grail. In this paper, we propose FEEL - an indoor localization system that uses a fusion of three low-energy sensors: IMU, UWB, and radar. We provide detailed software and hardware architecture of FEEL. Further, we propose Adaptive Sensing Algorithm (ASA) for opportunistically minimizing energy consumption of FEEL by adjusting the sensing frequency to the dynamics of the physical environment. Our extensive performance evaluation over diverse test settings reveal that FEEL provides a localization accuracy of <7cm with ultra-low latency of around 3ms. Further, ASA yields up to 20% energy saving with only a marginal trade-off in accuracy.