 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAIM: Acoustic Inertial Measurement for Indoor Drone Localization and Tracking
Apr 02, 2025

We present Acoustic Inertial Measurement (AIM), a one-of-a-kind technique for indoor drone localization and tracking. Indoor drone localization and tracking are arguably a crucial, yet unsolved challenge: in GPS-denied environments, existing approaches enjoy limited applicability, especially in Non-Line of Sight (NLoS), require extensive environment instrumentation, or demand considerable hardware/software changes on drones. In contrast, AIM exploits the acoustic characteristics of the drones to estimate their location and derive their motion, even in NLoS settings. We tame location estimation errors using a dedicated Kalman filter and the Interquartile Range rule (IQR). We implement AIM using an off-the-shelf microphone array and evaluate its performance with a commercial drone under varied settings. Results indicate that the mean localization error of AIM is 46% lower than commercial UWB-based systems in complex indoor scenarios, where state-of-the-art infrared systems would not even work because of NLoS settings. We further demonstrate that AIM can be extended to support indoor spaces with arbitrary ranges and layouts without loss of accuracy by deploying distributed microphone arrays.
Indoor Drone Localization and Tracking Based on Acoustic Inertial Measurement
Apr 01, 2025


We present Acoustic Inertial Measurement (AIM), a one-of-a-kind technique for indoor drone localization and tracking. Indoor drone localization and tracking are arguably a crucial, yet unsolved challenge: in GPS-denied environments, existing approaches enjoy limited applicability, especially in Non-Line of Sight (NLoS), require extensive environment instrumentation, or demand considerable hardware/software changes on drones. In contrast, AIM exploits the acoustic characteristics of the drones to estimate their location and derive their motion, even in NLoS settings. We tame location estimation errors using a dedicated Kalman filter and the Interquartile Range rule (IQR) and demonstrate that AIM can support indoor spaces with arbitrary ranges and layouts. We implement AIM using an off-the-shelf microphone array and evaluate its performance with a commercial drone under varied settings. Results indicate that the mean localization error of AIM is 46% lower than that of commercial UWB-based systems in a complex 10m\times10m indoor scenario, where state-of-the-art infrared systems would not even work because of NLoS situations. When distributed microphone arrays are deployed, the mean error can be reduced to less than 0.5m in a 20m range, and even support spaces with arbitrary ranges and layouts.
Shaping and Being Shaped by Drones: Supporting Perception-Action Loops
Dec 15, 2023



We report on a three-day challenge during which five teams each programmed a nanodrone to be piloted through an obstacle course using bodily movement, in a 3D transposition of the '80s video-game Pacman. Using a bricolage approach to analyse interviews, field notes, video recordings, and inspection of each team's code revealed how participants were shaping and, in turn, became shaped in bodily ways by the drones' limitations. We observed how teams adapted to compete by: 1) shifting from aiming for seamless human-drone interaction, to seeing drones as fragile, wilful, and prone to crashes; 2) engaging with intimate, bodily interactions to more precisely understand, probe, and delimit each drone's capabilities; 3) adopting different strategies, emphasising either training the drone or training the pilot. We contribute with an empirical, somaesthetically focused account of current challenges in HDI and call for programming environments that support action-feedback loops for design and programming purposes.
BEAVIS: Balloon Enabled Aerial Vehicle for IoT and Sensing
Aug 02, 2023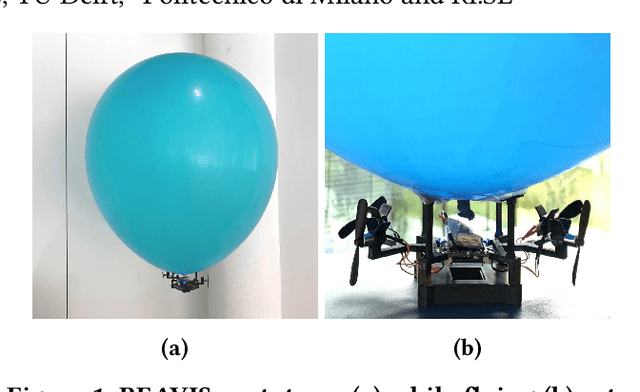
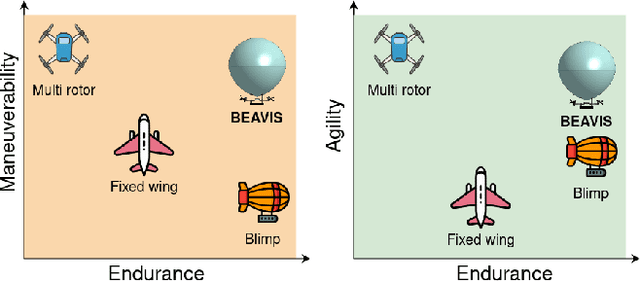
UAVs are becoming versatile and valuable platforms for various applications. However, the main limitation is their flying time. We present BEAVIS, a novel aerial robotic platform striking an unparalleled trade-off between the manoeuvrability of drones and the long lasting capacity of blimps. BEAVIS scores highly in applications where drones enjoy unconstrained mobility yet suffer from limited lifetime. A nonlinear flight controller exploiting novel, unexplored, aerodynamic phenomena to regulate the ambient pressure and enable all translational and yaw degrees of freedom is proposed without direct actuation in the vertical direction. BEAVIS has built-in rotor fault detection and tolerance. We explain the design and the necessary background in detail. We verify the dynamics of BEAVIS and demonstrate its distinct advantages, such as agility, over existing platforms including the degrees of freedom akin to a drone with 11.36x increased lifetime. We exemplify the potential of BEAVIS to become an invaluable platform for many applications.