 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTangles: Unpacking Extended Collision Experiences with Soma Trajectories
Mar 20, 2025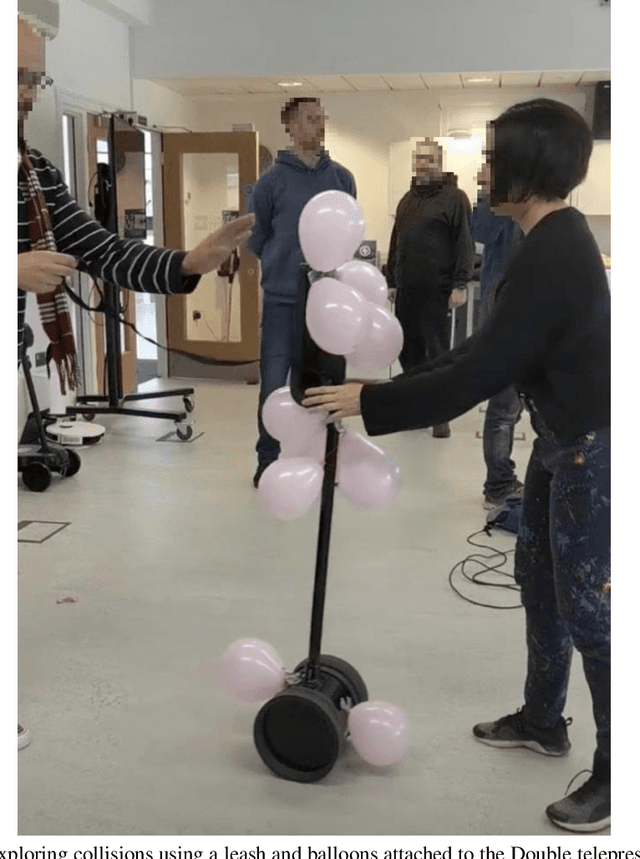
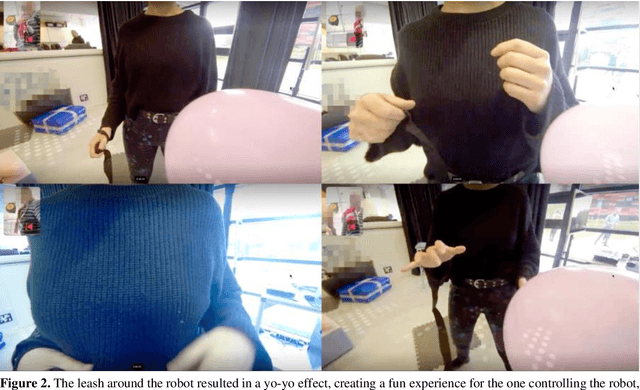

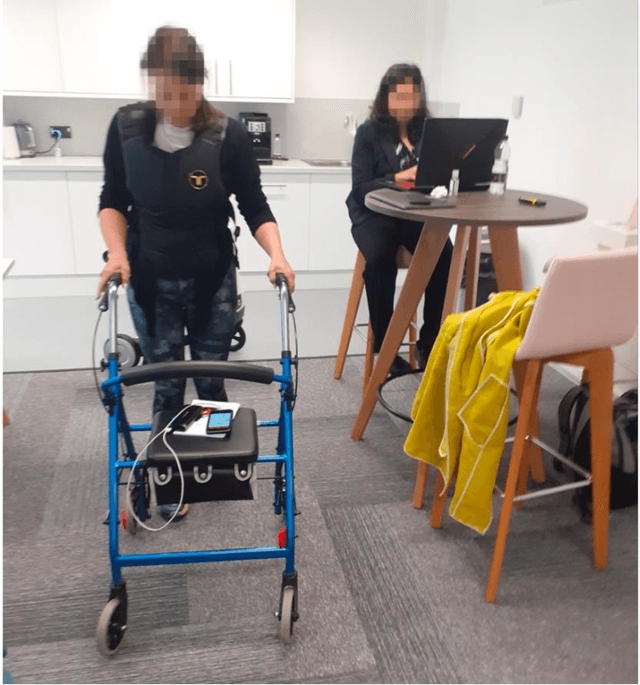
We reappraise the idea of colliding with robots, moving from a position that tries to avoid or mitigate collisions to one that considers them an important facet of human interaction. We report on a soma design workshop that explored how our bodies could collide with telepresence robots, mobility aids, and a quadruped robot. Based on our findings, we employed soma trajectories to analyse collisions as extended experiences that negotiate key transitions of consent, preparation, launch, contact, ripple, sting, untangle, debris and reflect. We then employed these ideas to analyse two collision experiences, an accidental collision between a person and a drone, and the deliberate design of a robot to play with cats, revealing how real-world collisions involve the complex and ongoing entanglement of soma trajectories. We discuss how viewing collisions as entangled trajectories, or tangles, can be used analytically, as a design approach, and as a lens to broach ethical complexity.
Shaping and Being Shaped by Drones: Supporting Perception-Action Loops
Dec 15, 2023



We report on a three-day challenge during which five teams each programmed a nanodrone to be piloted through an obstacle course using bodily movement, in a 3D transposition of the '80s video-game Pacman. Using a bricolage approach to analyse interviews, field notes, video recordings, and inspection of each team's code revealed how participants were shaping and, in turn, became shaped in bodily ways by the drones' limitations. We observed how teams adapted to compete by: 1) shifting from aiming for seamless human-drone interaction, to seeing drones as fragile, wilful, and prone to crashes; 2) engaging with intimate, bodily interactions to more precisely understand, probe, and delimit each drone's capabilities; 3) adopting different strategies, emphasising either training the drone or training the pilot. We contribute with an empirical, somaesthetically focused account of current challenges in HDI and call for programming environments that support action-feedback loops for design and programming purposes.