 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Detection -- Orchestrating Human-Robot-Robot Assistance via an Internet of Robotic Things Paradigm
Sep 26, 2025


Hospital patient falls remain a critical and costly challenge worldwide. While conventional fall prevention systems typically rely on post-fall detection or reactive alerts, they also often suffer from high false positive rates and fail to address the underlying patient needs that lead to bed-exit attempts. This paper presents a novel system architecture that leverages the Internet of Robotic Things (IoRT) to orchestrate human-robot-robot interaction for proactive and personalized patient assistance. The system integrates a privacy-preserving thermal sensing model capable of real-time bed-exit prediction, with two coordinated robotic agents that respond dynamically based on predicted intent and patient input. This orchestrated response could not only reduce fall risk but also attend to the patient's underlying motivations for movement, such as thirst, discomfort, or the need for assistance, before a hazardous situation arises. Our contributions with this pilot study are three-fold: (1) a modular IoRT-based framework enabling distributed sensing, prediction, and multi-robot coordination; (2) a demonstration of low-resolution thermal sensing for accurate, privacy-preserving preemptive bed-exit detection; and (3) results from a user study and systematic error analysis that inform the design of situationally aware, multi-agent interactions in hospital settings. The findings highlight how interactive and connected robotic systems can move beyond passive monitoring to deliver timely, meaningful assistance, empowering safer, more responsive care environments.
Facilitating the Emergence of Assistive Robots to Support Frailty: Psychosocial and Environmental Realities
Sep 10, 2025While assistive robots have much potential to help older people with frailty-related needs, there are few in use. There is a gap between what is developed in laboratories and what would be viable in real-world contexts. Through a series of co-design workshops (61 participants across 7 sessions) including those with lived experience of frailty, their carers, and healthcare professionals, we gained a deeper understanding of everyday issues concerning the place of new technologies in their lives. A persona-based approach surfaced emotional, social, and psychological issues. Any assistive solution must be developed in the context of this complex interplay of psychosocial and environmental factors. Our findings, presented as design requirements in direct relation to frailty, can help promote design thinking that addresses people's needs in a more pragmatic way to move assistive robotics closer to real-world use.
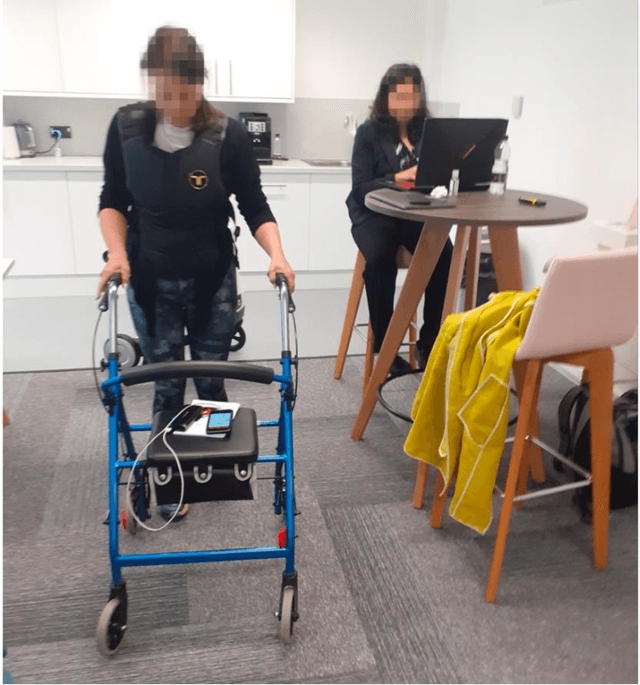
Analyzing Gait Adaptation with Hemiplegia Simulation Suits and Digital Twins
Sep 05, 2025



To advance the development of assistive and rehabilitation robots, it is essential to conduct experiments early in the design cycle. However, testing early prototypes directly with users can pose safety risks. To address this, we explore the use of condition-specific simulation suits worn by healthy participants in controlled environments as a means to study gait changes associated with various impairments and support rapid prototyping. This paper presents a study analyzing the impact of a hemiplegia simulation suit on gait. We collected biomechanical data using a Vicon motion capture system and Delsys Trigno EMG and IMU sensors under four walking conditions: with and without a rollator, and with and without the simulation suit. The gait data was integrated into a digital twin model, enabling machine learning analyses to detect the use of the simulation suit and rollator, identify turning behavior, and evaluate how the suit affects gait over time. Our findings show that the simulation suit significantly alters movement and muscle activation patterns, prompting users to compensate with more abrupt motions. We also identify key features and sensor modalities that are most informative for accurately capturing gait dynamics and modeling human-rollator interaction within the digital twin framework.
Ensemble Foreground Management for Unsupervised Object Discovery
Jul 28, 2025



Unsupervised object discovery (UOD) aims to detect and segment objects in 2D images without handcrafted annotations. Recent progress in self-supervised representation learning has led to some success in UOD algorithms. However, the absence of ground truth provides existing UOD methods with two challenges: 1) determining if a discovered region is foreground or background, and 2) knowing how many objects remain undiscovered. To address these two problems, previous solutions rely on foreground priors to distinguish if the discovered region is foreground, and conduct one or fixed iterations of discovery. However, the existing foreground priors are heuristic and not always robust, and a fixed number of discoveries leads to under or over-segmentation, since the number of objects in images varies. This paper introduces UnionCut, a robust and well-grounded foreground prior based on min-cut and ensemble methods that detects the union of foreground areas of an image, allowing UOD algorithms to identify foreground objects and stop discovery once the majority of the foreground union in the image is segmented. In addition, we propose UnionSeg, a distilled transformer of UnionCut that outputs the foreground union more efficiently and accurately. Our experiments show that by combining with UnionCut or UnionSeg, previous state-of-the-art UOD methods witness an increase in the performance of single object discovery, saliency detection and self-supervised instance segmentation on various benchmarks. The code is available at https://github.com/YFaris/UnionCut.
Tangles: Unpacking Extended Collision Experiences with Soma Trajectories
Mar 20, 2025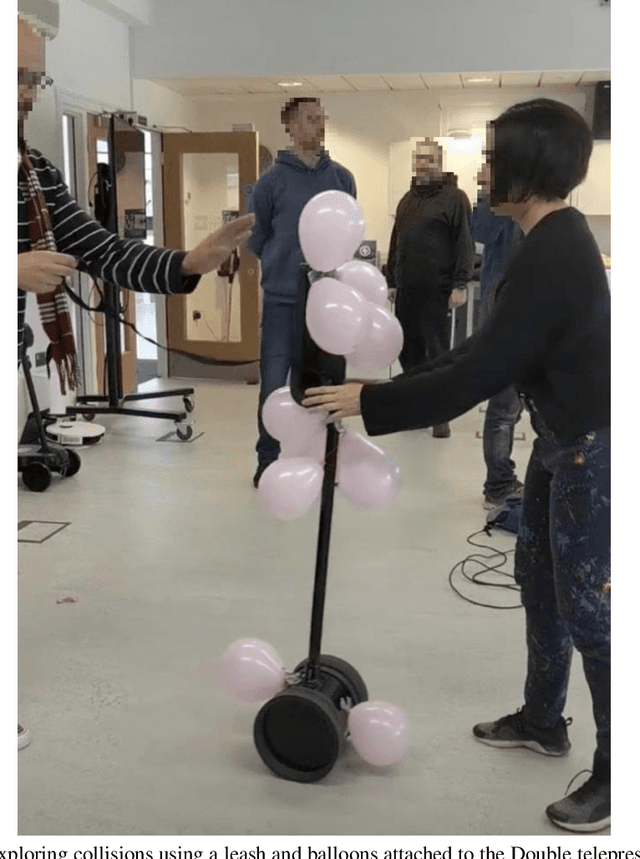
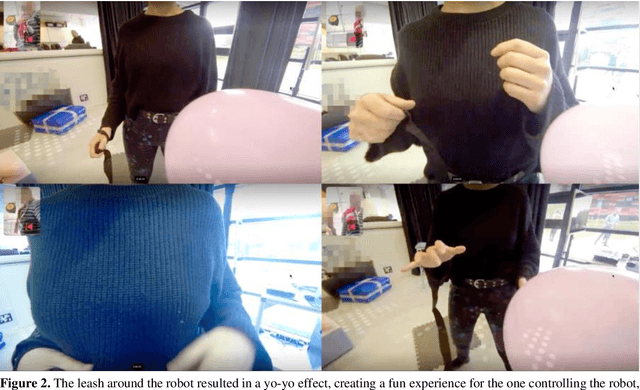

We reappraise the idea of colliding with robots, moving from a position that tries to avoid or mitigate collisions to one that considers them an important facet of human interaction. We report on a soma design workshop that explored how our bodies could collide with telepresence robots, mobility aids, and a quadruped robot. Based on our findings, we employed soma trajectories to analyse collisions as extended experiences that negotiate key transitions of consent, preparation, launch, contact, ripple, sting, untangle, debris and reflect. We then employed these ideas to analyse two collision experiences, an accidental collision between a person and a drone, and the deliberate design of a robot to play with cats, revealing how real-world collisions involve the complex and ongoing entanglement of soma trajectories. We discuss how viewing collisions as entangled trajectories, or tangles, can be used analytically, as a design approach, and as a lens to broach ethical complexity.
Vibrotactile information coding strategies for a body-worn vest to aid robot-human collaboration
Feb 28, 2025This paper explores the use of a body-worn vibrotactile vest to convey real-time information from robot to operator. Vibrotactile communication could be useful in providing information without compropmising or loading a person's visual or auditory perception. This paper considers applications in Urban Search and Rescue (USAR) scenarios where a human working alongside a robot is likely to be operating in high cognitive load conditions. The focus is on understanding how best to convey information considering different vibrotactile information coding strategies to enhance scene understanding in scenarios where a robot might be operating remotely as a scout. In exploring information representation, this paper introduces Semantic Haptics, using shapes and patterns to represent certain events as if the skin was a screen, and shows how these lead to bettter learnability and interpreation accuracy.
The Dilemma of Decision-Making in the Real World: When Robots Struggle to Make Choices Due to Situational Constraints
Dec 02, 2024In order to demonstrate the limitations of assistive robotic capabilities in noisy real-world environments, we propose a Decision-Making Scenario analysis approach that examines the challenges due to user and environmental uncertainty, and incorporates these into user studies. The scenarios highlight how personalization can be achieved through more human-robot collaboration, particularly in relation to individuals with visual, physical, cognitive, auditory impairments, clinical needs, environmental factors (noise, light levels, clutter), and daily living activities. Our goal is for this contribution to prompt reflection and aid in the design of improved robots (embodiment, sensors, actuation, cognition) and their behavior, and we aim to introduces a groundbreaking strategy to enhance human-robot collaboration, addressing the complexities of decision-making under uncertainty through a Scenario analysis approach. By emphasizing user-centered design principles and offering actionable solutions to real-world challenges, this work aims to identify key decision-making challenges and propose potential solutions.