 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTangles: Unpacking Extended Collision Experiences with Soma Trajectories
Paper and Code
Mar 20, 2025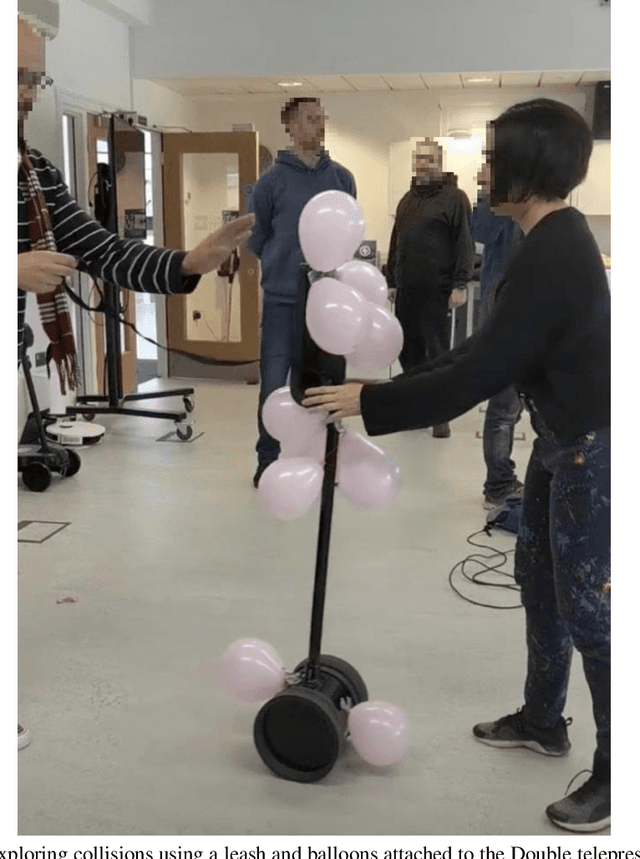
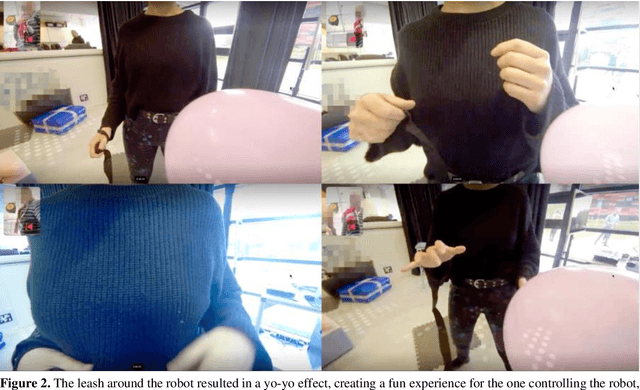

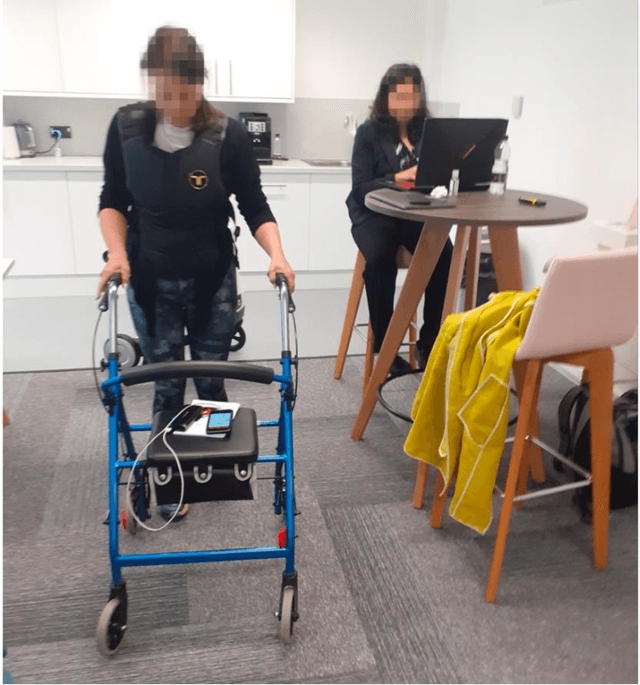
We reappraise the idea of colliding with robots, moving from a position that tries to avoid or mitigate collisions to one that considers them an important facet of human interaction. We report on a soma design workshop that explored how our bodies could collide with telepresence robots, mobility aids, and a quadruped robot. Based on our findings, we employed soma trajectories to analyse collisions as extended experiences that negotiate key transitions of consent, preparation, launch, contact, ripple, sting, untangle, debris and reflect. We then employed these ideas to analyse two collision experiences, an accidental collision between a person and a drone, and the deliberate design of a robot to play with cats, revealing how real-world collisions involve the complex and ongoing entanglement of soma trajectories. We discuss how viewing collisions as entangled trajectories, or tangles, can be used analytically, as a design approach, and as a lens to broach ethical complexity.