 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTangles: Unpacking Extended Collision Experiences with Soma Trajectories
Mar 20, 2025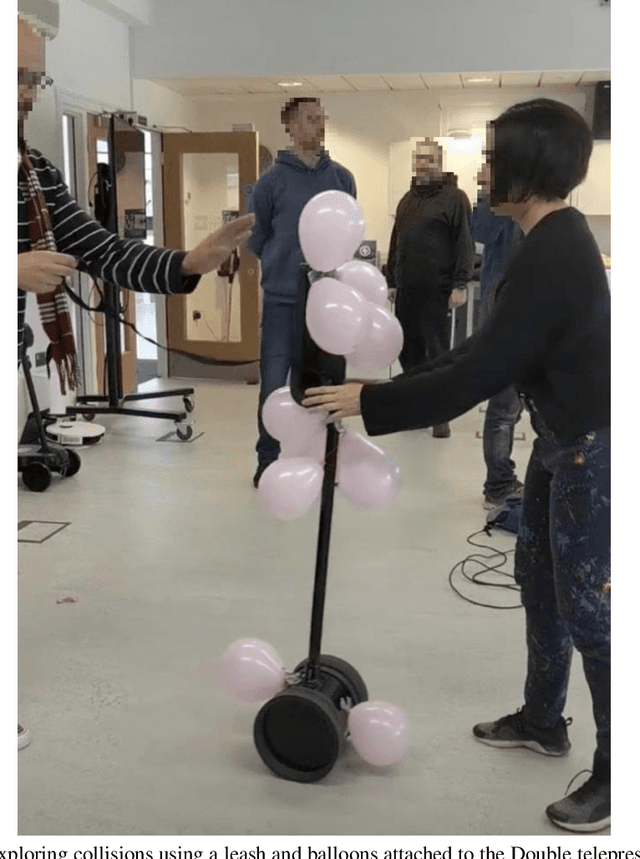
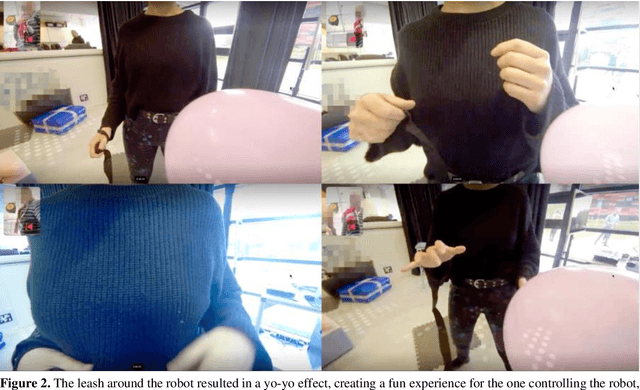

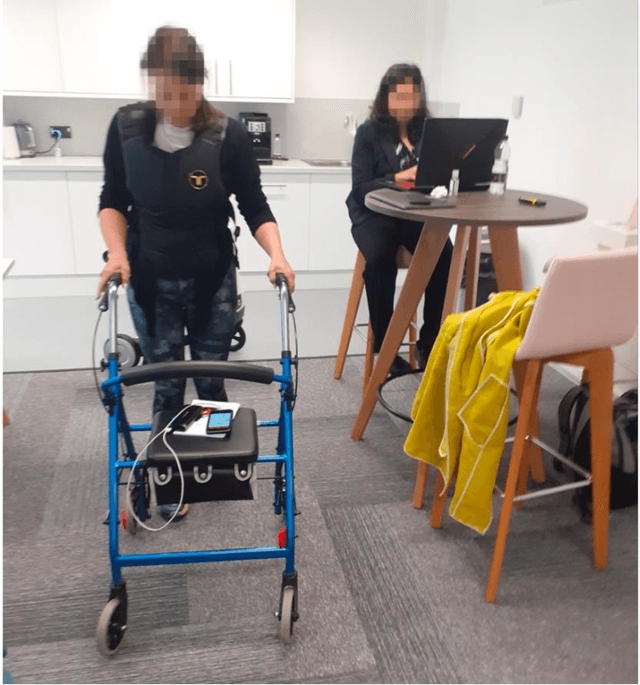
We reappraise the idea of colliding with robots, moving from a position that tries to avoid or mitigate collisions to one that considers them an important facet of human interaction. We report on a soma design workshop that explored how our bodies could collide with telepresence robots, mobility aids, and a quadruped robot. Based on our findings, we employed soma trajectories to analyse collisions as extended experiences that negotiate key transitions of consent, preparation, launch, contact, ripple, sting, untangle, debris and reflect. We then employed these ideas to analyse two collision experiences, an accidental collision between a person and a drone, and the deliberate design of a robot to play with cats, revealing how real-world collisions involve the complex and ongoing entanglement of soma trajectories. We discuss how viewing collisions as entangled trajectories, or tangles, can be used analytically, as a design approach, and as a lens to broach ethical complexity.
How Artists Improvise and Provoke Robotics
Oct 29, 2024We explore transdisciplinary collaborations between artists and roboticists across a portfolio of artworks. Brendan Walker's Broncomatic was a breath controlled mechanical rodeo bull ride. Blast Theory's Cat Royale deployed a robot arm to play with a family of three cats for twelve days. Different Bodies is a prototype improvised dance performance in which dancers with disabilities physically manipulate two mirrored robot arms. We reflect on these to explore how artists shape robotics research through the two key strategies of improvisation and provocation. Artists are skilled at improvising extended robot experiences that surface opportunities for technology-focused design, but which also require researchers to improvise their research processes. Artists may provoke audiences into reflecting on the societal implications of robots, but at the same time challenge the established techno-centric concepts, methods and underlying epistemology of robotics research.
Shaping and Being Shaped by Drones: Supporting Perception-Action Loops
Dec 15, 2023



We report on a three-day challenge during which five teams each programmed a nanodrone to be piloted through an obstacle course using bodily movement, in a 3D transposition of the '80s video-game Pacman. Using a bricolage approach to analyse interviews, field notes, video recordings, and inspection of each team's code revealed how participants were shaping and, in turn, became shaped in bodily ways by the drones' limitations. We observed how teams adapted to compete by: 1) shifting from aiming for seamless human-drone interaction, to seeing drones as fragile, wilful, and prone to crashes; 2) engaging with intimate, bodily interactions to more precisely understand, probe, and delimit each drone's capabilities; 3) adopting different strategies, emphasising either training the drone or training the pilot. We contribute with an empirical, somaesthetically focused account of current challenges in HDI and call for programming environments that support action-feedback loops for design and programming purposes.
Satellite-based high-resolution maps of cocoa planted area for Côte d'Ivoire and Ghana
Jun 13, 2022
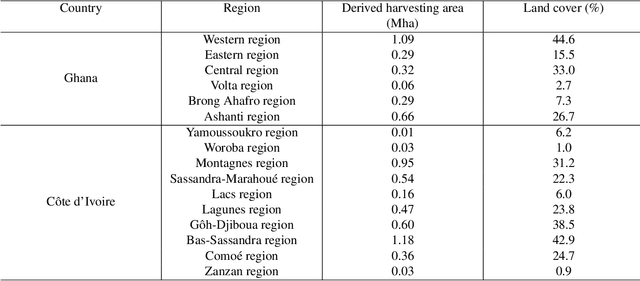
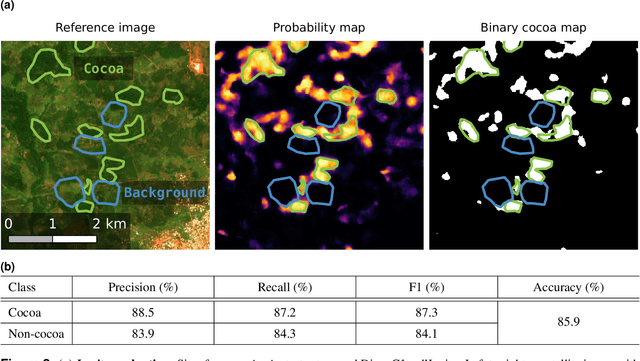
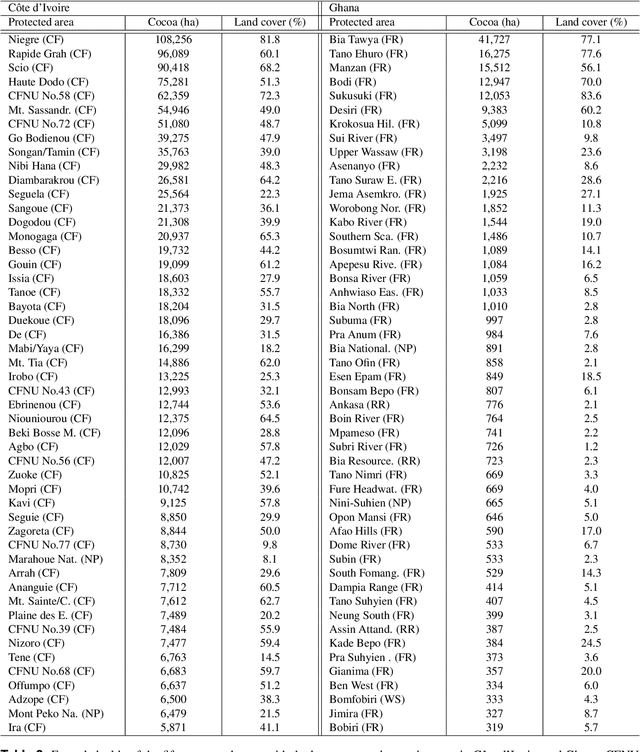
C\^ote d'Ivoire and Ghana, the world's largest producers of cocoa, account for two thirds of the global cocoa production. In both countries, cocoa is the primary perennial crop, providing income to almost two million farmers. Yet precise maps of cocoa planted area are missing, hindering accurate quantification of expansion in protected areas, production and yields, and limiting information available for improved sustainability governance. Here, we combine cocoa plantation data with publicly available satellite imagery in a deep learning framework and create high-resolution maps of cocoa plantations for both countries, validated in situ. Our results suggest that cocoa cultivation is an underlying driver of over 37% and 13% of forest loss in protected areas in C\^ote d'Ivoire and Ghana, respectively, and that official reports substantially underestimate the planted area, up to 40% in Ghana. These maps serve as a crucial building block to advance understanding of conservation and economic development in cocoa producing regions.