 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAIM: Acoustic Inertial Measurement for Indoor Drone Localization and Tracking
Apr 02, 2025

We present Acoustic Inertial Measurement (AIM), a one-of-a-kind technique for indoor drone localization and tracking. Indoor drone localization and tracking are arguably a crucial, yet unsolved challenge: in GPS-denied environments, existing approaches enjoy limited applicability, especially in Non-Line of Sight (NLoS), require extensive environment instrumentation, or demand considerable hardware/software changes on drones. In contrast, AIM exploits the acoustic characteristics of the drones to estimate their location and derive their motion, even in NLoS settings. We tame location estimation errors using a dedicated Kalman filter and the Interquartile Range rule (IQR). We implement AIM using an off-the-shelf microphone array and evaluate its performance with a commercial drone under varied settings. Results indicate that the mean localization error of AIM is 46% lower than commercial UWB-based systems in complex indoor scenarios, where state-of-the-art infrared systems would not even work because of NLoS settings. We further demonstrate that AIM can be extended to support indoor spaces with arbitrary ranges and layouts without loss of accuracy by deploying distributed microphone arrays.
Indoor Drone Localization and Tracking Based on Acoustic Inertial Measurement
Apr 01, 2025


We present Acoustic Inertial Measurement (AIM), a one-of-a-kind technique for indoor drone localization and tracking. Indoor drone localization and tracking are arguably a crucial, yet unsolved challenge: in GPS-denied environments, existing approaches enjoy limited applicability, especially in Non-Line of Sight (NLoS), require extensive environment instrumentation, or demand considerable hardware/software changes on drones. In contrast, AIM exploits the acoustic characteristics of the drones to estimate their location and derive their motion, even in NLoS settings. We tame location estimation errors using a dedicated Kalman filter and the Interquartile Range rule (IQR) and demonstrate that AIM can support indoor spaces with arbitrary ranges and layouts. We implement AIM using an off-the-shelf microphone array and evaluate its performance with a commercial drone under varied settings. Results indicate that the mean localization error of AIM is 46% lower than that of commercial UWB-based systems in a complex 10m\times10m indoor scenario, where state-of-the-art infrared systems would not even work because of NLoS situations. When distributed microphone arrays are deployed, the mean error can be reduced to less than 0.5m in a 20m range, and even support spaces with arbitrary ranges and layouts.
mmHRR: Monitoring Heart Rate Recovery with Millimeter Wave Radar
Mar 28, 2025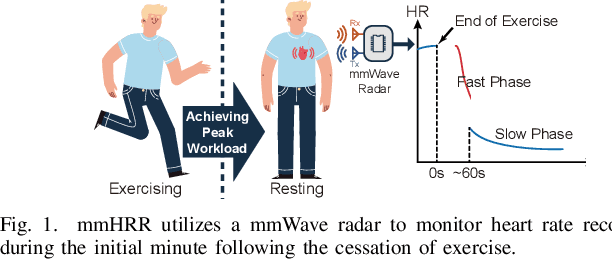
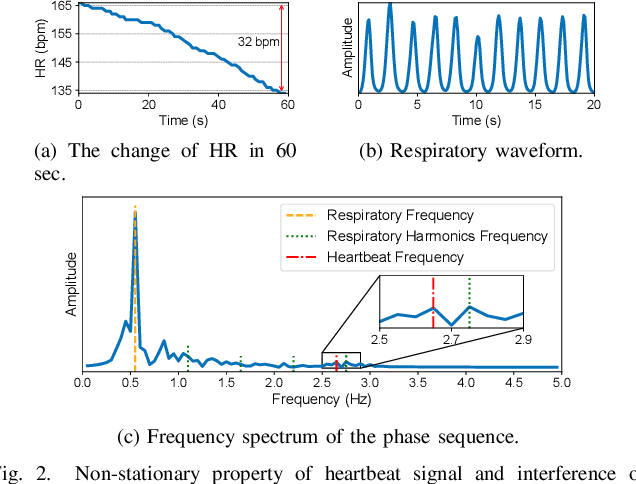
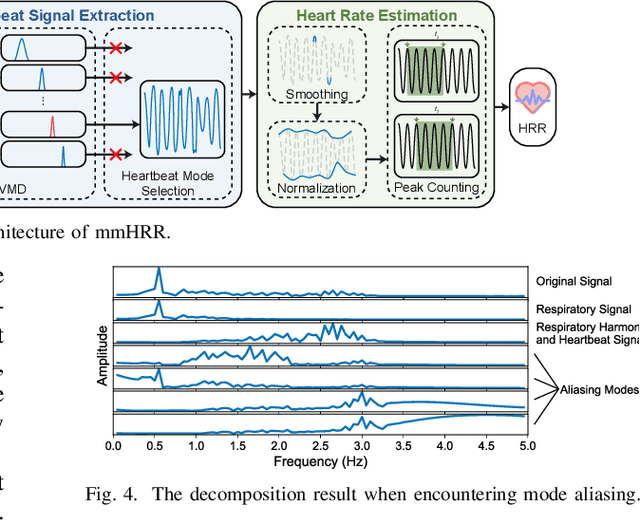
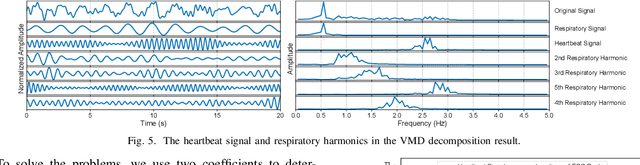
Heart rate recovery (HRR) within the initial minute following exercise is a widely utilized metric for assessing cardiac autonomic function in individuals and predicting mortality risk in patients with cardiovascular disease. However, prevailing solutions for HRR monitoring typically involve the use of specialized medical equipment or contact wearable sensors, resulting in high costs and poor user experience. In this paper, we propose a contactless HRR monitoring technique, mmHRR, which achieves accurate heart rate (HR) estimation with a commercial mmWave radar. Unlike HR estimation at rest, the HR varies quickly after exercise and the heartbeat signal entangles with the respiration harmonics. To overcome these hurdles and effectively estimate the HR from the weak and non-stationary heartbeat signal, we propose a novel signal processing pipeline, including dynamic target tracking, adaptive heartbeat signal extraction, and accurate HR estimation with composite sliding windows. Real-world experiments demonstrate that mmHRR exhibits exceptional robustness across diverse environmental conditions, and achieves an average HR estimation error of 3.31 bpm (beats per minute), 71% lower than that of the state-of-the-art method.
mmHawkeye: Passive UAV Detection with a COTS mmWave Radar
Aug 12, 2023



Small Unmanned Aerial Vehicles (UAVs) are becoming potential threats to security-sensitive areas and personal privacy. A UAV can shoot photos at height, but how to detect such an uninvited intruder is an open problem. This paper presents mmHawkeye, a passive approach for UAV detection with a COTS millimeter wave (mmWave) radar. mmHawkeye doesn't require prior knowledge of the type, motions, and flight trajectory of the UAV, while exploiting the signal feature induced by the UAV's periodic micro-motion (PMM) for long-range accurate detection. The design is therefore effective in dealing with low-SNR and uncertain reflected signals from the UAV. mmHawkeye can further track the UAV's position with dynamic programming and particle filtering, and identify it with a Long Short-Term Memory (LSTM) based detector. We implement mmHawkeye on a commercial mmWave radar and evaluate its performance under varied settings. The experimental results show that mmHawkeye has a detection accuracy of 95.8% and can realize detection at a range up to 80m.