 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoiceSHIELD-Small: Real-Time Malicious Speech Detection and Transcription
Mar 08, 2026Voice interfaces are quickly becoming a common way for people to interact with AI systems. This also brings new security risks, such as prompt injection, social engineering, and harmful voice commands. Traditional security methods rely on converting speech to text and then filtering that text, which introduces delays and can ignore important audio cues. This paper introduces VoiceSHIELD-Small, a lightweight model that works in real time. It can transcribe speech and detect whether it is safe or harmful, all in one step. Built on OpenAI's Whisper-small encoder, VoiceSHIELD adds a mean-pooling layer and a simple classification head. It takes just 90-120 milliseconds to classify audio on mid-tier GPUs, while transcription happens at the same time. Tested on a balanced set of 947 audio clips, the model achieved 99.16 percent accuracy and an F1 score of 0.9865. At the default setting, it missed 2.33 percent of harmful inputs. Cross-validation showed consistent performance (F1 standard deviation = 0.0026). The paper also covers the model's design, training data, performance trade-offs, and responsible use guidelines. VoiceSHIELD is released under the MIT license to encourage further research and adoption in voice AI security.
Toward Human-AI Alignment in Large-Scale Multi-Player Games
Feb 05, 2024



Achieving human-AI alignment in complex multi-agent games is crucial for creating trustworthy AI agents that enhance gameplay. We propose a method to evaluate this alignment using an interpretable task-sets framework, focusing on high-level behavioral tasks instead of low-level policies. Our approach has three components. First, we analyze extensive human gameplay data from Xbox's Bleeding Edge (100K+ games), uncovering behavioral patterns in a complex task space. This task space serves as a basis set for a behavior manifold capturing interpretable axes: fight-flight, explore-exploit, and solo-multi-agent. Second, we train an AI agent to play Bleeding Edge using a Generative Pretrained Causal Transformer and measure its behavior. Third, we project human and AI gameplay to the proposed behavior manifold to compare and contrast. This allows us to interpret differences in policy as higher-level behavioral concepts, e.g., we find that while human players exhibit variability in fight-flight and explore-exploit behavior, AI players tend towards uniformity. Furthermore, AI agents predominantly engage in solo play, while humans often engage in cooperative and competitive multi-agent patterns. These stark differences underscore the need for interpretable evaluation, design, and integration of AI in human-aligned applications. Our study advances the alignment discussion in AI and especially generative AI research, offering a measurable framework for interpretable human-agent alignment in multiplayer gaming.
Content addressable memory without catastrophic forgetting by heteroassociation with a fixed scaffold
Feb 16, 2022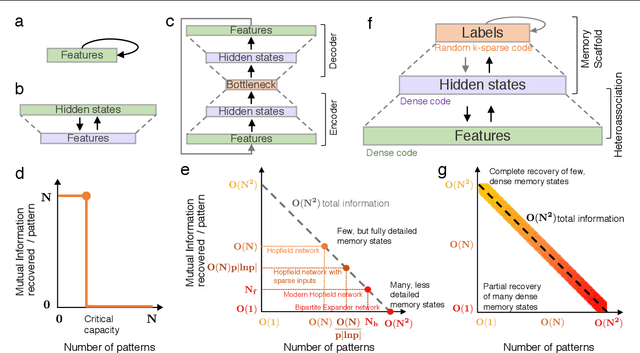
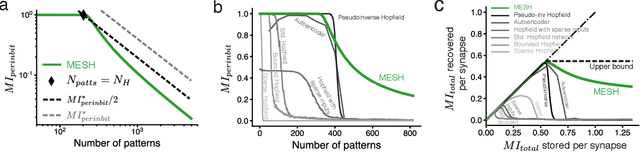
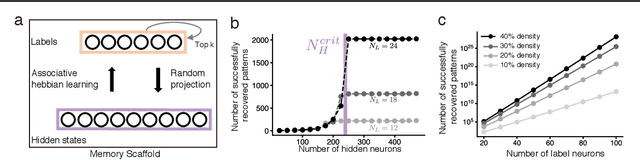
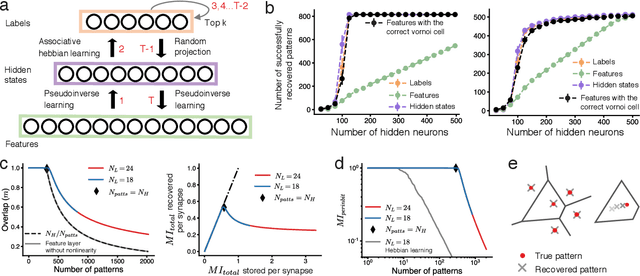
Content-addressable memory (CAM) networks, so-called because stored items can be recalled by partial or corrupted versions of the items, exhibit near-perfect recall of a small number of information-dense patterns below capacity and a `memory cliff' beyond, such that inserting a single additional pattern results in catastrophic forgetting of all stored patterns. We propose a novel ANN architecture, Memory Scaffold with Heteroassociation (MESH), that gracefully trades-off pattern richness with pattern number to generate a CAM continuum without a memory cliff: Small numbers of patterns are stored with complete information recovery matching standard CAMs, while inserting more patterns still results in partial recall of every pattern, with an information per pattern that scales inversely with the number of patterns. Motivated by the architecture of the Entorhinal-Hippocampal memory circuit in the brain, MESH is a tripartite architecture with pairwise interactions that uses a predetermined set of internally stabilized states together with heteroassociation between the internal states and arbitrary external patterns. We show analytically and experimentally that MESH nearly saturates the total information bound (given by the number of synapses) for CAM networks, invariant of the number of stored patterns, outperforming all existing CAM models.
Map Induction: Compositional spatial submap learning for efficient exploration in novel environments
Oct 23, 2021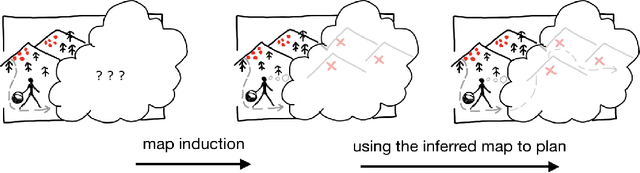
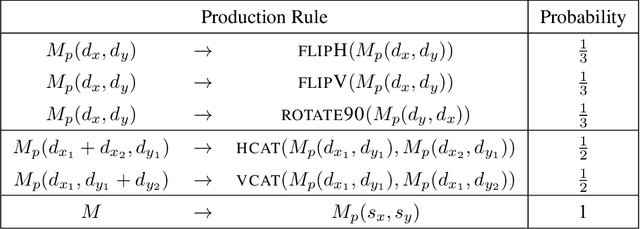
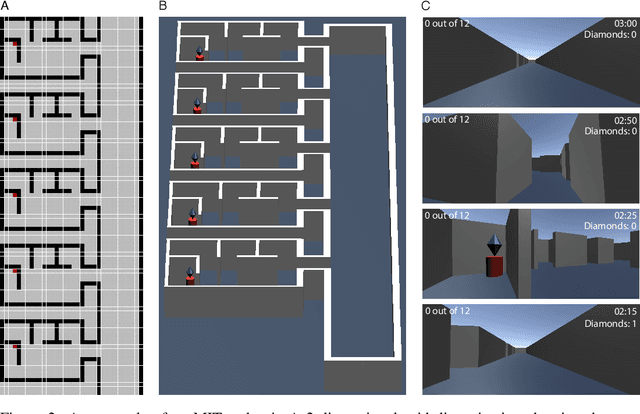
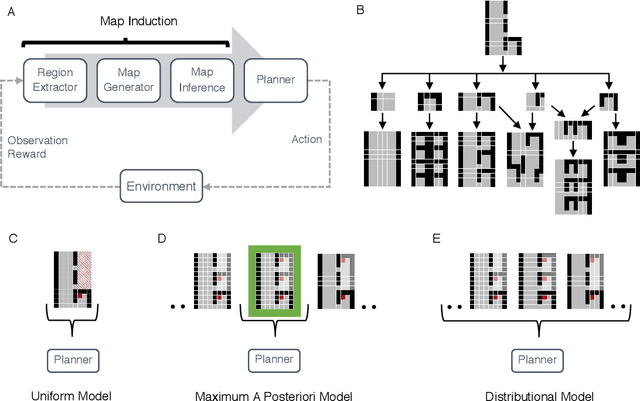
Humans are expert explorers. Understanding the computational cognitive mechanisms that support this efficiency can advance the study of the human mind and enable more efficient exploration algorithms. We hypothesize that humans explore new environments efficiently by inferring the structure of unobserved spaces using spatial information collected from previously explored spaces. This cognitive process can be modeled computationally using program induction in a Hierarchical Bayesian framework that explicitly reasons about uncertainty with strong spatial priors. Using a new behavioral Map Induction Task, we demonstrate that this computational framework explains human exploration behavior better than non-inductive models and outperforms state-of-the-art planning algorithms when applied to a realistic spatial navigation domain.