 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMap Induction: Compositional spatial submap learning for efficient exploration in novel environments
Paper and Code
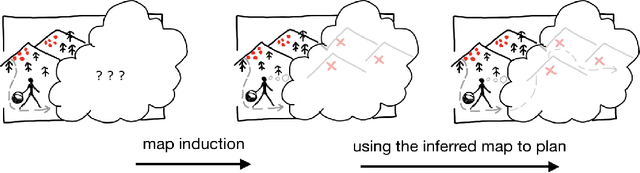
Humans are expert explorers. Understanding the computational cognitive mechanisms that support this efficiency can advance the study of the human mind and enable more efficient exploration algorithms. We hypothesize that humans explore new environments efficiently by inferring the structure of unobserved spaces using spatial information collected from previously explored spaces. This cognitive process can be modeled computationally using program induction in a Hierarchical Bayesian framework that explicitly reasons about uncertainty with strong spatial priors. Using a new behavioral Map Induction Task, we demonstrate that this computational framework explains human exploration behavior better than non-inductive models and outperforms state-of-the-art planning algorithms when applied to a realistic spatial navigation domain.