 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwiLTra-Bench: The Swiss Legal Translation Benchmark
Mar 03, 2025In Switzerland legal translation is uniquely important due to the country's four official languages and requirements for multilingual legal documentation. However, this process traditionally relies on professionals who must be both legal experts and skilled translators -- creating bottlenecks and impacting effective access to justice. To address this challenge, we introduce SwiLTra-Bench, a comprehensive multilingual benchmark of over 180K aligned Swiss legal translation pairs comprising laws, headnotes, and press releases across all Swiss languages along with English, designed to evaluate LLM-based translation systems. Our systematic evaluation reveals that frontier models achieve superior translation performance across all document types, while specialized translation systems excel specifically in laws but under-perform in headnotes. Through rigorous testing and human expert validation, we demonstrate that while fine-tuning open SLMs significantly improves their translation quality, they still lag behind the best zero-shot prompted frontier models such as Claude-3.5-Sonnet. Additionally, we present SwiLTra-Judge, a specialized LLM evaluation system that aligns best with human expert assessments.
MVFuseNet: Improving End-to-End Object Detection and Motion Forecasting through Multi-View Fusion of LiDAR Data
Apr 21, 2021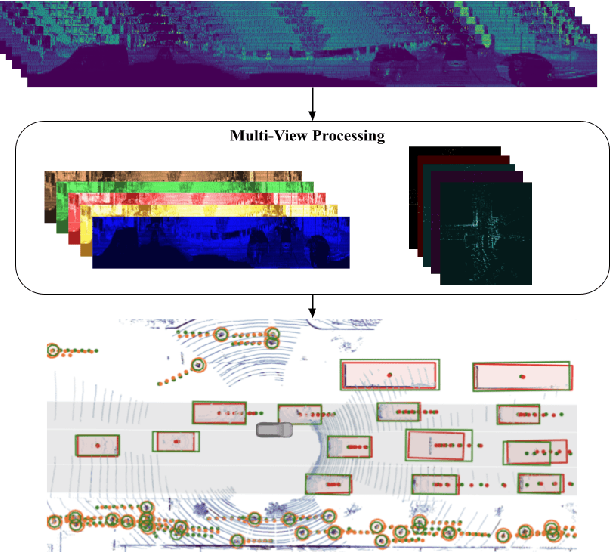
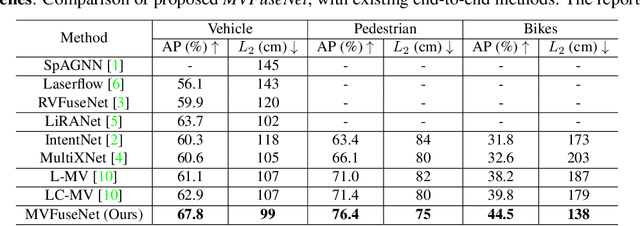
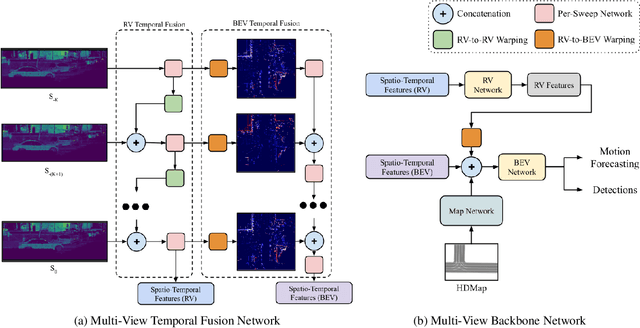
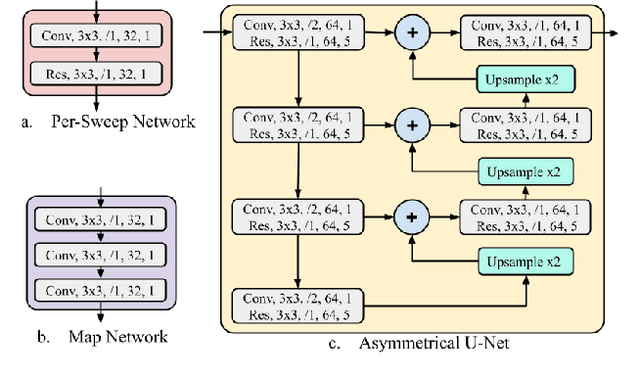
In this work, we propose \textit{MVFuseNet}, a novel end-to-end method for joint object detection and motion forecasting from a temporal sequence of LiDAR data. Most existing methods operate in a single view by projecting data in either range view (RV) or bird's eye view (BEV). In contrast, we propose a method that effectively utilizes both RV and BEV for spatio-temporal feature learning as part of a temporal fusion network as well as for multi-scale feature learning in the backbone network. Further, we propose a novel sequential fusion approach that effectively utilizes multiple views in the temporal fusion network. We show the benefits of our multi-view approach for the tasks of detection and motion forecasting on two large-scale self-driving data sets, achieving state-of-the-art results. Furthermore, we show that MVFusenet scales well to large operating ranges while maintaining real-time performance.
FLAG n' FLARE: Fast Linearly-Coupled Adaptive Gradient Methods
Nov 11, 2017We consider first order gradient methods for effectively optimizing a composite objective in the form of a sum of smooth and, potentially, non-smooth functions. We present accelerated and adaptive gradient methods, called FLAG and FLARE, which can offer the best of both worlds. They can achieve the optimal convergence rate by attaining the optimal first-order oracle complexity for smooth convex optimization. Additionally, they can adaptively and non-uniformly re-scale the gradient direction to adapt to the limited curvature available and conform to the geometry of the domain. We show theoretically and empirically that, through the compounding effects of acceleration and adaptivity, FLAG and FLARE can be highly effective for many data fitting and machine learning applications.