 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable Product Classification for Customs
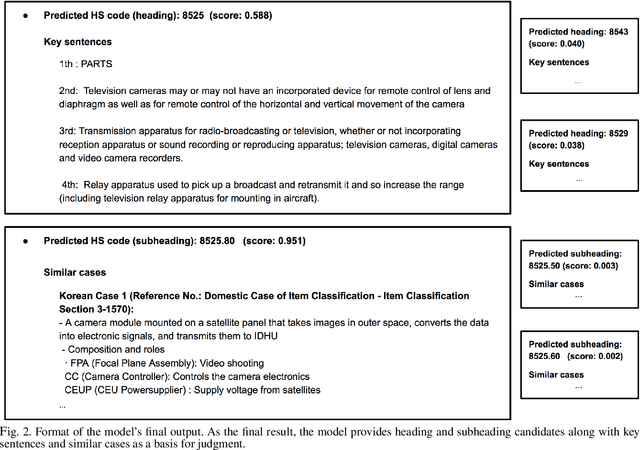
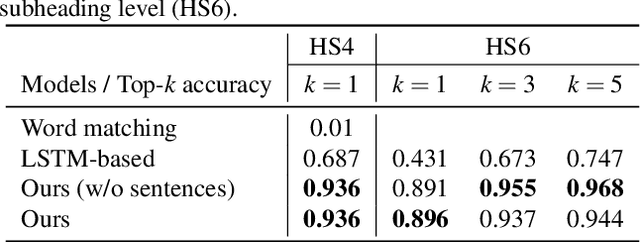
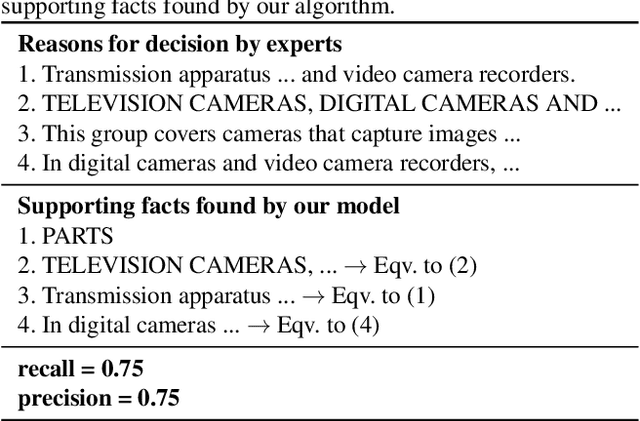
Nov 18, 2023The task of assigning internationally accepted commodity codes (aka HS codes) to traded goods is a critical function of customs offices. Like court decisions made by judges, this task follows the doctrine of precedent and can be nontrivial even for experienced officers. Together with the Korea Customs Service (KCS), we propose a first-ever explainable decision supporting model that suggests the most likely subheadings (i.e., the first six digits) of the HS code. The model also provides reasoning for its suggestion in the form of a document that is interpretable by customs officers. We evaluated the model using 5,000 cases that recently received a classification request. The results showed that the top-3 suggestions made by our model had an accuracy of 93.9\% when classifying 925 challenging subheadings. A user study with 32 customs experts further confirmed that our algorithmic suggestions accompanied by explainable reasonings, can substantially reduce the time and effort taken by customs officers for classification reviews.
Inferring Traffic Models in Terminal Airspace from Flight Tracks and Procedures
Mar 17, 2023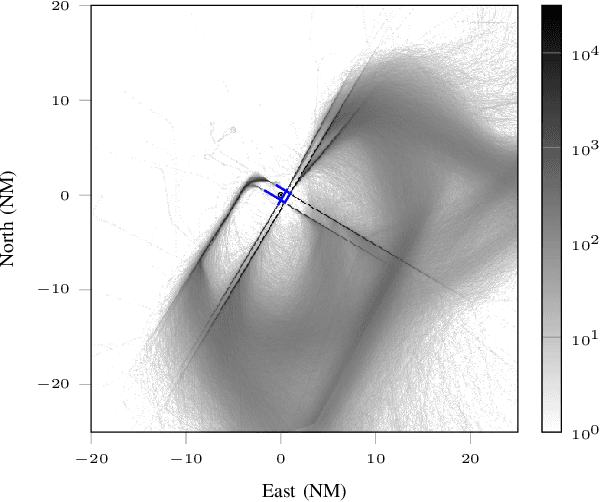
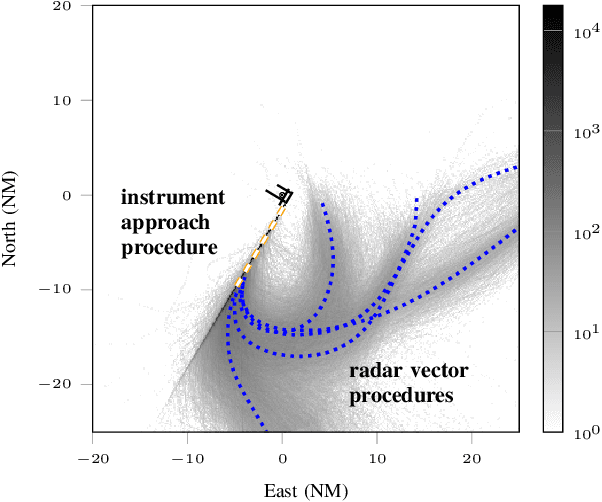
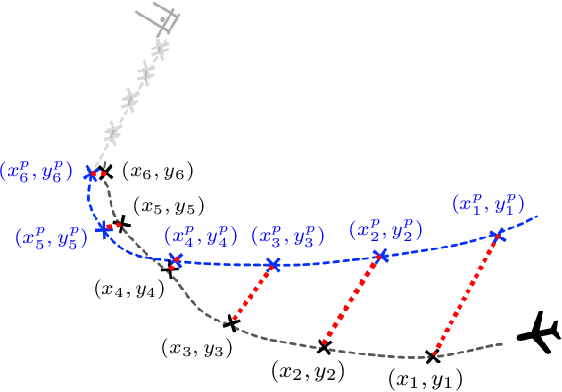
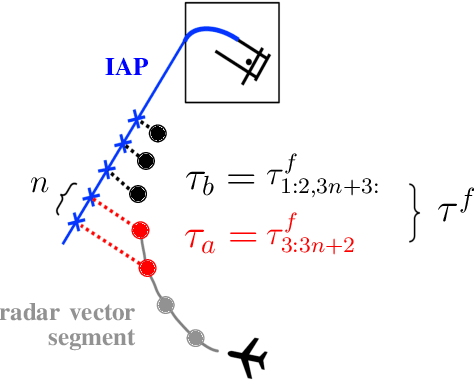
Realistic aircraft trajectory models are useful in the design and validation of air traffic management (ATM) systems. Models of aircraft operated under instrument flight rules (IFR) require capturing the variability inherent in how aircraft follow standard flight procedures. The variability in aircraft behavior varies among flight stages. In this paper, we propose a probabilistic model that can learn the variability from the procedural data and flight tracks collected from radar surveillance data. For each segment, a Gaussian mixture model is used to learn the deviations of aircraft trajectories from their procedures. Given new procedures, we can generate synthetic trajectories by sampling a series of deviations from the trained Gaussian distributions and reconstructing the aircraft trajectory using the deviations and the procedures. We extend this method to capture pairwise correlations between aircraft and show how a pairwise model can be used to generate traffic involving an arbitrary number of aircraft. We demonstrate the proposed models on the arrival tracks and procedures of the John F. Kennedy International Airport. The distributional similarity between the original and the synthetic trajectory dataset was evaluated using the Jensen-Shannon divergence between the empirical distributions of different variables. We also provide qualitative analyses of the synthetic trajectories generated from the models.
Conditional Approximate Normalizing Flows for Joint Multi-Step Probabilistic Forecasting with Application to Electricity Demand
Jan 14, 2022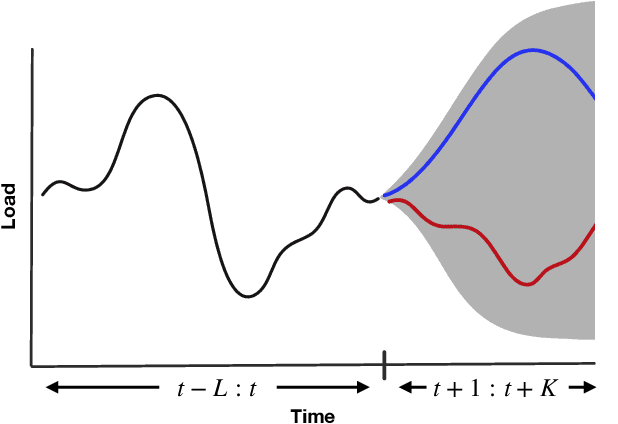
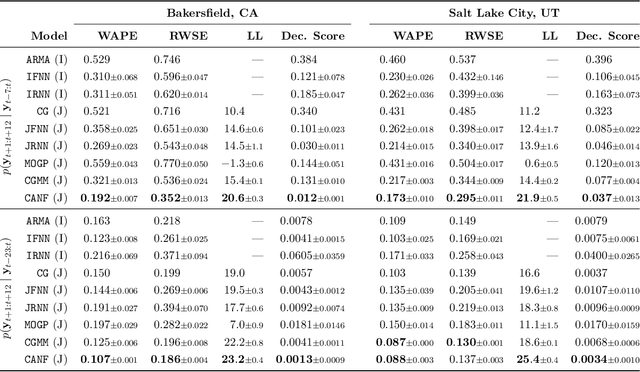

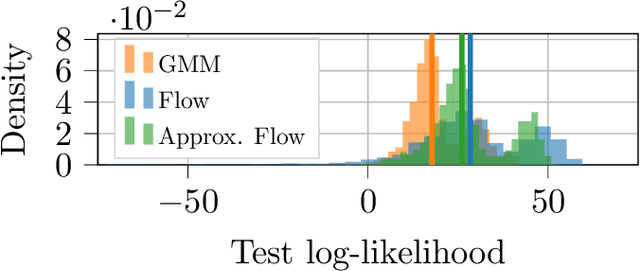
Some real-world decision-making problems require making probabilistic forecasts over multiple steps at once. However, methods for probabilistic forecasting may fail to capture correlations in the underlying time-series that exist over long time horizons as errors accumulate. One such application is with resource scheduling under uncertainty in a grid environment, which requires forecasting electricity demand that is inherently noisy, but often cyclic. In this paper, we introduce the conditional approximate normalizing flow (CANF) to make probabilistic multi-step time-series forecasts when correlations are present over long time horizons. We first demonstrate our method's efficacy on estimating the density of a toy distribution, finding that CANF improves the KL divergence by one-third compared to that of a Gaussian mixture model while still being amenable to explicit conditioning. We then use a publicly available household electricity consumption dataset to showcase the effectiveness of CANF on joint probabilistic multi-step forecasting. Empirical results show that conditional approximate normalizing flows outperform other methods in terms of multi-step forecast accuracy and lead to up to 10x better scheduling decisions. Our implementation is available at https://github.com/sisl/JointDemandForecasting.
Classification of Goods Using Text Descriptions With Sentences Retrieval
Nov 02, 2021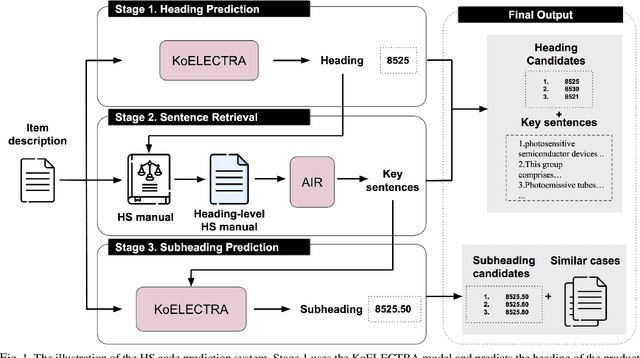
The task of assigning and validating internationally accepted commodity code (HS code) to traded goods is one of the critical functions at the customs office. This decision is crucial to importers and exporters, as it determines the tariff rate. However, similar to court decisions made by judges, the task can be non-trivial even for experienced customs officers. The current paper proposes a deep learning model to assist this seemingly challenging HS code classification. Together with Korea Customs Service, we built a decision model based on KoELECTRA that suggests the most likely heading and subheadings (i.e., the first four and six digits) of the HS code. Evaluation on 129,084 past cases shows that the top-3 suggestions made by our model have an accuracy of 95.5% in classifying 265 subheadings. This promising result implies algorithms may reduce the time and effort taken by customs officers substantially by assisting the HS code classification task.
A Hybrid Rule-Based and Data-Driven Approach to Driver Modeling through Particle Filtering
Aug 29, 2021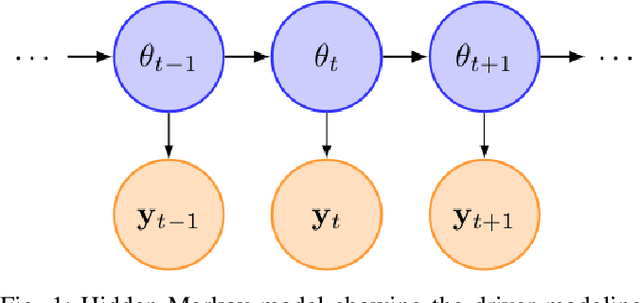
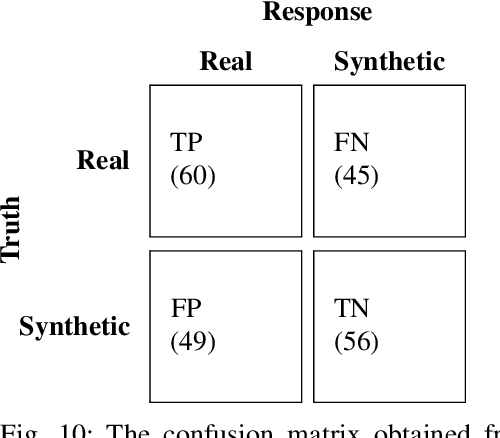
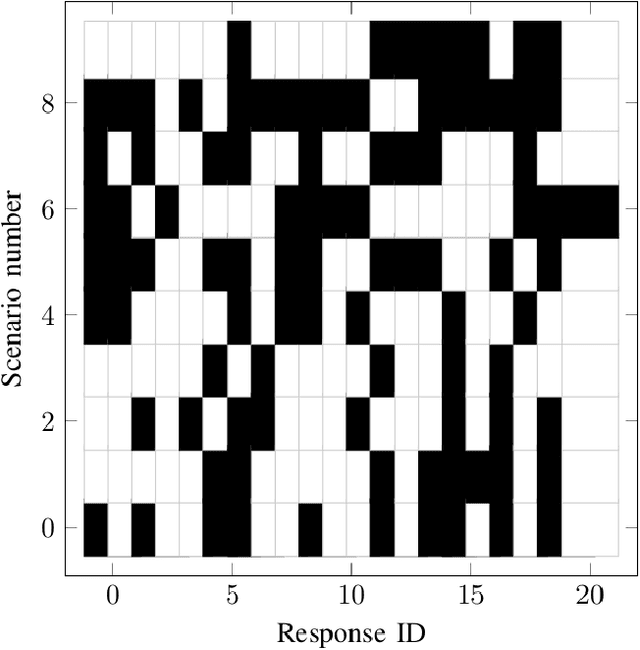
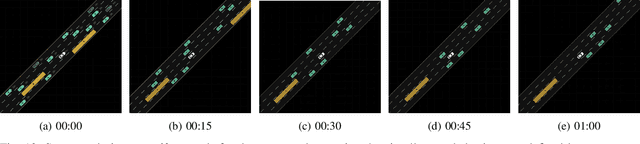
Autonomous vehicles need to model the behavior of surrounding human driven vehicles to be safe and efficient traffic participants. Existing approaches to modeling human driving behavior have relied on both data-driven and rule-based methods. While data-driven models are more expressive, rule-based models are interpretable, which is an important requirement for safety-critical domains like driving. However, rule-based models are not sufficiently representative of data, and data-driven models are yet unable to generate realistic traffic simulation due to unrealistic driving behavior such as collisions. In this paper, we propose a methodology that combines rule-based modeling with data-driven learning. While the rules are governed by interpretable parameters of the driver model, these parameters are learned online from driving demonstration data using particle filtering. We perform driver modeling experiments on the task of highway driving and merging using data from three real-world driving demonstration datasets. Our results show that driver models based on our hybrid rule-based and data-driven approach can accurately capture real-world driving behavior. Further, we assess the realism of the driving behavior generated by our model by having humans perform a driving Turing test, where they are asked to distinguish between videos of real driving and those generated using our driver models.