 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProspective Learning in Retrospect
Jul 10, 2025In most real-world applications of artificial intelligence, the distributions of the data and the goals of the learners tend to change over time. The Probably Approximately Correct (PAC) learning framework, which underpins most machine learning algorithms, fails to account for dynamic data distributions and evolving objectives, often resulting in suboptimal performance. Prospective learning is a recently introduced mathematical framework that overcomes some of these limitations. We build on this framework to present preliminary results that improve the algorithm and numerical results, and extend prospective learning to sequential decision-making scenarios, specifically foraging. Code is available at: https://github.com/neurodata/prolearn2.
Prospective Learning: Learning for a Dynamic Future
Oct 31, 2024In real-world applications, the distribution of the data, and our goals, evolve over time. The prevailing theoretical framework for studying machine learning, namely probably approximately correct (PAC) learning, largely ignores time. As a consequence, existing strategies to address the dynamic nature of data and goals exhibit poor real-world performance. This paper develops a theoretical framework called "Prospective Learning" that is tailored for situations when the optimal hypothesis changes over time. In PAC learning, empirical risk minimization (ERM) is known to be consistent. We develop a learner called Prospective ERM, which returns a sequence of predictors that make predictions on future data. We prove that the risk of prospective ERM converges to the Bayes risk under certain assumptions on the stochastic process generating the data. Prospective ERM, roughly speaking, incorporates time as an input in addition to the data. We show that standard ERM as done in PAC learning, without incorporating time, can result in failure to learn when distributions are dynamic. Numerical experiments illustrate that prospective ERM can learn synthetic and visual recognition problems constructed from MNIST and CIFAR-10.
A Novel Brain Decoding Method: a Correlation Network Framework for Revealing Brain Connections
Dec 01, 2017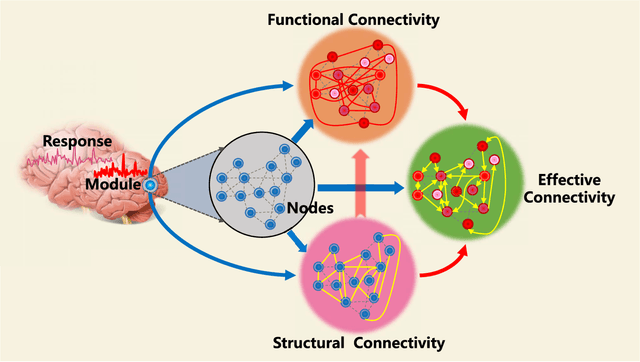
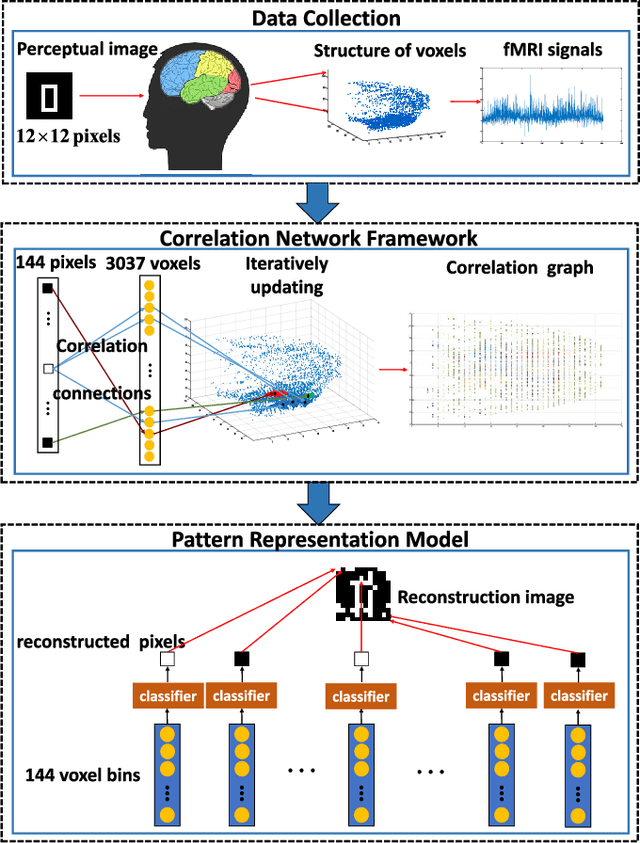
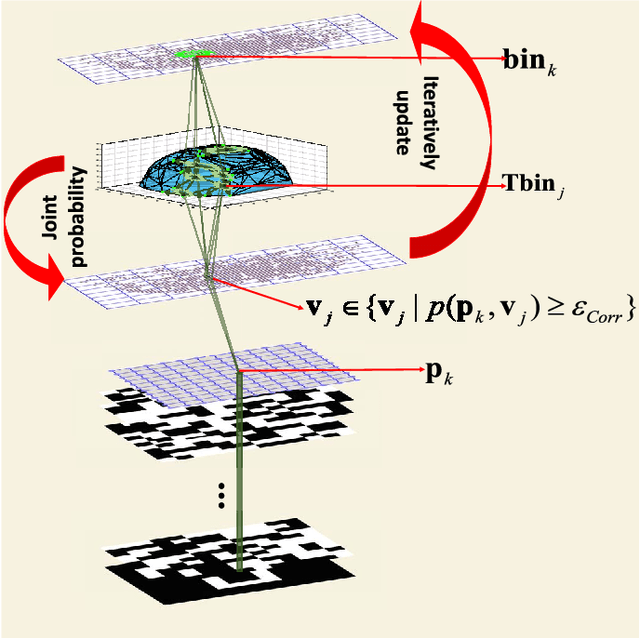
Brain decoding is a hot spot in cognitive science, which focuses on reconstructing perceptual images from brain activities. Analyzing the correlations of collected data from human brain activities and representing activity patterns are two problems in brain decoding based on functional magnetic resonance imaging (fMRI) signals. However, existing correlation analysis methods mainly focus on the strength information of voxel, which reveals functional connectivity in the cerebral cortex. They tend to neglect the structural information that implies the intracortical or intrinsic connections; that is, structural connectivity. Hence, the effective connectivity inferred by these methods is relatively unilateral. Therefore, we proposed a correlation network (CorrNet) framework that could be flexibly combined with diverse pattern representation models. In the CorrNet framework, the topological correlation was introduced to reveal structural information. Rich correlations were obtained, which contributed to specifying the underlying effective connectivity. We also combined the CorrNet framework with a linear support vector machine (SVM) and a dynamic evolving spike neuron network (SNN) for pattern representation separately, thus providing a novel method for decoding cognitive activity patterns. Experimental results verified the reliability and robustness of our CorrNet framework and demonstrated that the new method achieved significant improvement in brain decoding over comparable methods.
Detecting Drivable Area for Self-driving Cars: An Unsupervised Approach
May 01, 2017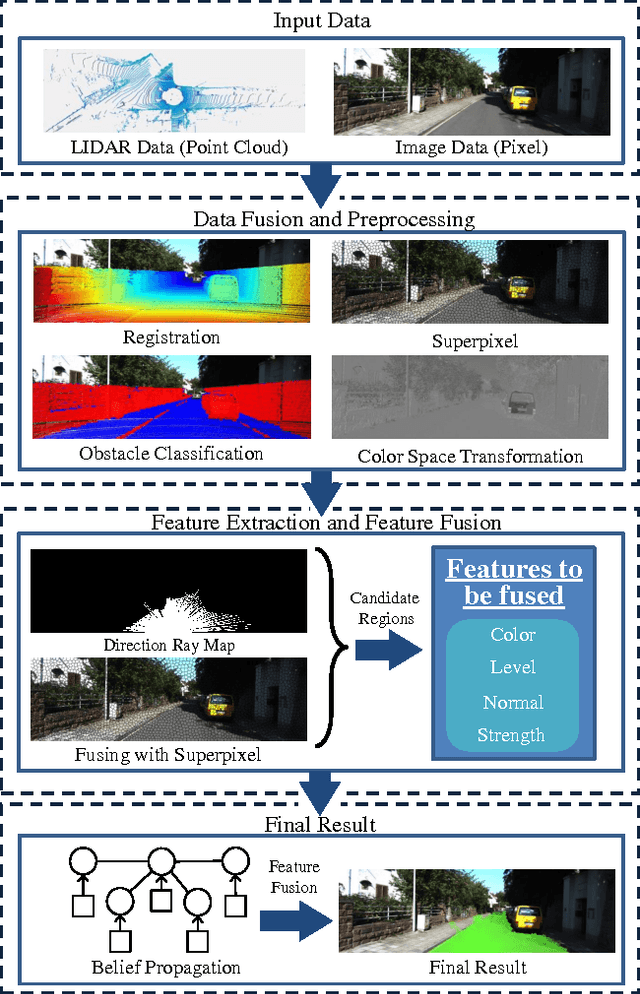
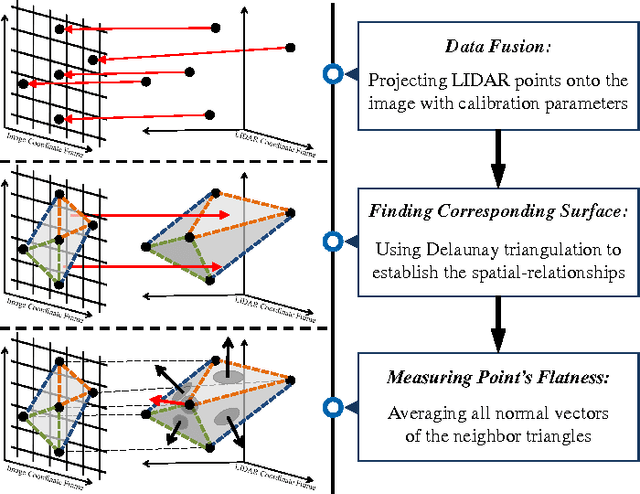


It has been well recognized that detecting drivable area is central to self-driving cars. Most of existing methods attempt to locate road surface by using lane line, thereby restricting to drivable area on which have a clear lane mark. This paper proposes an unsupervised approach for detecting drivable area utilizing both image data from a monocular camera and point cloud data from a 3D-LIDAR scanner. Our approach locates initial drivable areas based on a "direction ray map" obtained by image-LIDAR data fusion. Besides, a fusion of the feature level is also applied for more robust performance. Once the initial drivable areas are described by different features, the feature fusion problem is formulated as a Markov network and a belief propagation algorithm is developed to perform the model inference. Our approach is unsupervised and avoids common hypothesis, yet gets state-of-the-art results on ROAD-KITTI benchmark. Experiments show that our unsupervised approach is efficient and robust for detecting drivable area for self-driving cars.