 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting Drivable Area for Self-driving Cars: An Unsupervised Approach
Paper and Code
May 01, 2017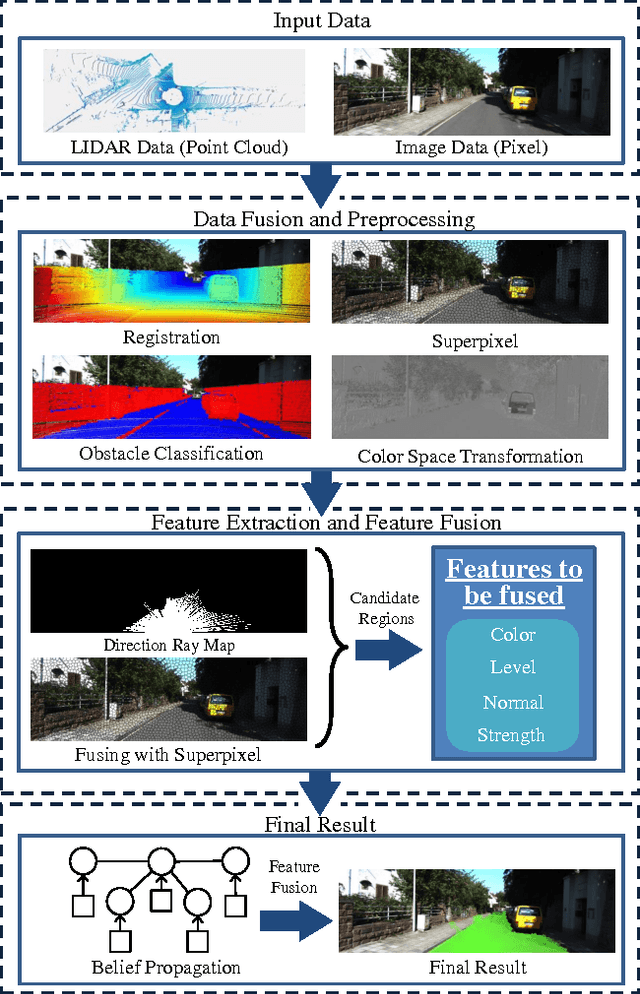
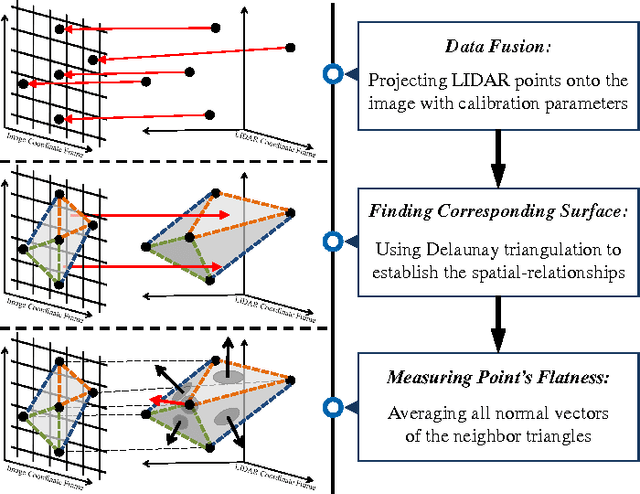


It has been well recognized that detecting drivable area is central to self-driving cars. Most of existing methods attempt to locate road surface by using lane line, thereby restricting to drivable area on which have a clear lane mark. This paper proposes an unsupervised approach for detecting drivable area utilizing both image data from a monocular camera and point cloud data from a 3D-LIDAR scanner. Our approach locates initial drivable areas based on a "direction ray map" obtained by image-LIDAR data fusion. Besides, a fusion of the feature level is also applied for more robust performance. Once the initial drivable areas are described by different features, the feature fusion problem is formulated as a Markov network and a belief propagation algorithm is developed to perform the model inference. Our approach is unsupervised and avoids common hypothesis, yet gets state-of-the-art results on ROAD-KITTI benchmark. Experiments show that our unsupervised approach is efficient and robust for detecting drivable area for self-driving cars.