 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeText-Image Conditioned 3D Generation
Mar 22, 2026High-quality 3D assets are essential for VR/AR, industrial design, and entertainment, motivating growing interest in generative models that create 3D content from user prompts. Most existing 3D generators, however, rely on a single conditioning modality: image-conditioned models achieve high visual fidelity by exploiting pixel-aligned cues but suffer from viewpoint bias when the input view is limited or ambiguous, while text-conditioned models provide broad semantic guidance yet lack low-level visual detail. This limits how users can express intent and raises a natural question: can these two modalities be combined for more flexible and faithful 3D generation? Our diagnostic study shows that even simple late fusion of text- and image-conditioned predictions outperforms single-modality models, revealing strong cross-modal complementarity. We therefore formalize Text-Image Conditioned 3D Generation, which requires joint reasoning over a visual exemplar and a textual specification. To address this task, we introduce TIGON, a minimalist dual-branch baseline with separate image- and text-conditioned backbones and lightweight cross-modal fusion. Extensive experiments show that text-image conditioning consistently improves over single-modality methods, highlighting complementary vision-language guidance as a promising direction for future 3D generation research. Project page: https://jumpat.github.io/tigon-page
WorldGrow: Generating Infinite 3D World
Oct 24, 2025



We tackle the challenge of generating the infinitely extendable 3D world -- large, continuous environments with coherent geometry and realistic appearance. Existing methods face key challenges: 2D-lifting approaches suffer from geometric and appearance inconsistencies across views, 3D implicit representations are hard to scale up, and current 3D foundation models are mostly object-centric, limiting their applicability to scene-level generation. Our key insight is leveraging strong generation priors from pre-trained 3D models for structured scene block generation. To this end, we propose WorldGrow, a hierarchical framework for unbounded 3D scene synthesis. Our method features three core components: (1) a data curation pipeline that extracts high-quality scene blocks for training, making the 3D structured latent representations suitable for scene generation; (2) a 3D block inpainting mechanism that enables context-aware scene extension; and (3) a coarse-to-fine generation strategy that ensures both global layout plausibility and local geometric/textural fidelity. Evaluated on the large-scale 3D-FRONT dataset, WorldGrow achieves SOTA performance in geometry reconstruction, while uniquely supporting infinite scene generation with photorealistic and structurally consistent outputs. These results highlight its capability for constructing large-scale virtual environments and potential for building future world models.
EndoGSLAM: Real-Time Dense Reconstruction and Tracking in Endoscopic Surgeries using Gaussian Splatting
Mar 22, 2024Precise camera tracking, high-fidelity 3D tissue reconstruction, and real-time online visualization are critical for intrabody medical imaging devices such as endoscopes and capsule robots. However, existing SLAM (Simultaneous Localization and Mapping) methods often struggle to achieve both complete high-quality surgical field reconstruction and efficient computation, restricting their intraoperative applications among endoscopic surgeries. In this paper, we introduce EndoGSLAM, an efficient SLAM approach for endoscopic surgeries, which integrates streamlined Gaussian representation and differentiable rasterization to facilitate over 100 fps rendering speed during online camera tracking and tissue reconstructing. Extensive experiments show that EndoGSLAM achieves a better trade-off between intraoperative availability and reconstruction quality than traditional or neural SLAM approaches, showing tremendous potential for endoscopic surgeries. The project page is at https://EndoGSLAM.loping151.com
GaussianObject: Just Taking Four Images to Get A High-Quality 3D Object with Gaussian Splatting
Feb 20, 2024
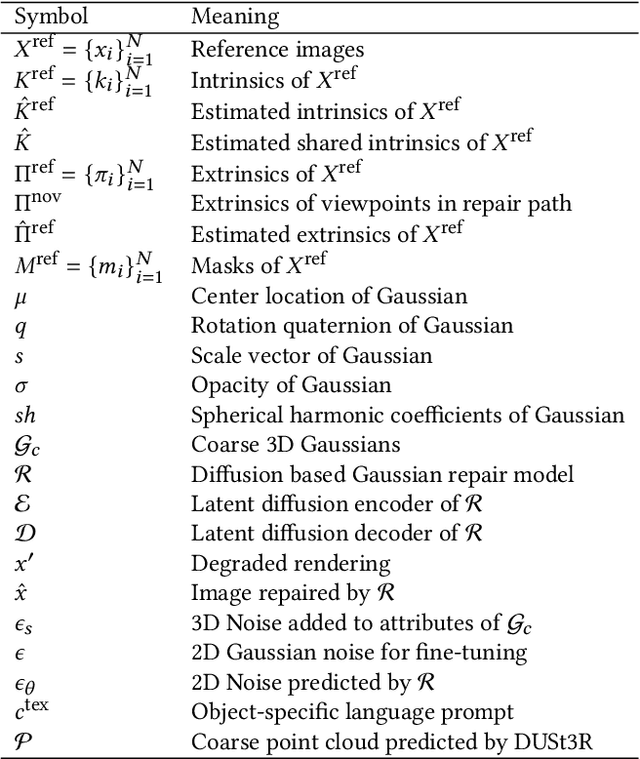
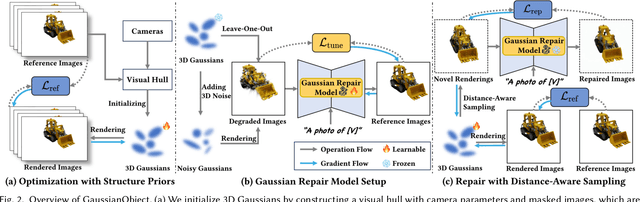
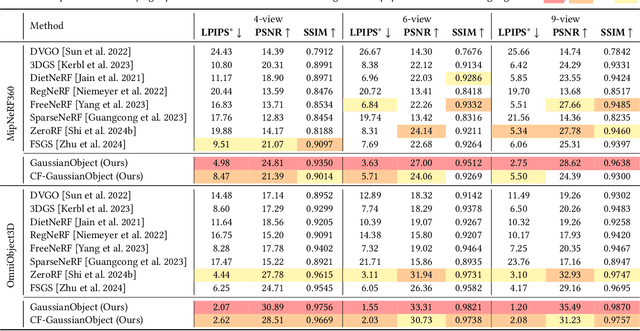
Reconstructing and rendering 3D objects from highly sparse views is of critical importance for promoting applications of 3D vision techniques and improving user experience. However, images from sparse views only contain very limited 3D information, leading to two significant challenges: 1) Difficulty in building multi-view consistency as images for matching are too few; 2) Partially omitted or highly compressed object information as view coverage is insufficient. To tackle these challenges, we propose GaussianObject, a framework to represent and render the 3D object with Gaussian splatting, that achieves high rendering quality with only 4 input images. We first introduce techniques of visual hull and floater elimination which explicitly inject structure priors into the initial optimization process for helping build multi-view consistency, yielding a coarse 3D Gaussian representation. Then we construct a Gaussian repair model based on diffusion models to supplement the omitted object information, where Gaussians are further refined. We design a self-generating strategy to obtain image pairs for training the repair model. Our GaussianObject is evaluated on several challenging datasets, including MipNeRF360, OmniObject3D, and OpenIllumination, achieving strong reconstruction results from only 4 views and significantly outperforming previous state-of-the-art methods.