 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Intrusive Graph-Based Bot Detection for E-Commerce Using Inductive Graph Neural Networks
Jan 30, 2026Malicious bots pose a growing threat to e-commerce platforms by scraping data, hoarding inventory, and perpetrating fraud. Traditional bot mitigation techniques, including IP blacklists and CAPTCHA-based challenges, are increasingly ineffective or intrusive, as modern bots leverage proxies, botnets, and AI-assisted evasion strategies. This work proposes a non-intrusive graph-based bot detection framework for e-commerce that models user session behavior through a graph representation and applies an inductive graph neural network for classification. The approach captures both relational structure and behavioral semantics, enabling accurate identification of subtle automated activity that evades feature-based methods. Experiments on real-world e-commerce traffic demonstrate that the proposed inductive graph model outperforms a strong session-level multilayer perceptron baseline in terms of AUC and F1 score. Additional adversarial perturbation and cold-start simulations show that the model remains robust under moderate graph modifications and generalizes effectively to previously unseen sessions and URLs. The proposed framework is deployment-friendly, integrates with existing systems without client-side instrumentation, and supports real-time inference and incremental updates, making it suitable for practical e-commerce security deployments.
Resilient Routing: Risk-Aware Dynamic Routing in Smart Logistics via Spatiotemporal Graph Learning
Jan 20, 2026With the rapid development of the e-commerce industry, the logistics network is experiencing unprecedented pressure. The traditional static routing strategy most time cannot tolerate the traffic congestion and fluctuating retail demand. In this paper, we propose a Risk-Aware Dynamic Routing(RADR) framework which integrates Spatiotemporal Graph Neural Networks (ST-GNN) with combinatorial optimization. We first construct a logistics topology graph by using the discrete GPS data using spatial clustering methods. Subsequently, a hybrid deep learning model combining Graph Convolutional Network (GCN) and Gated Recurrent Unit (GRU) is adopted to extract spatial correlations and temporal dependencies for predicting future congestion risks. These prediction results are then integrated into a dynamic edge weight mechanism to perform path planning. We evaluated the framework on the Smart Logistics Dataset 2024, which contains real-world Internet of Things(IoT) sensor data. The experimental results show that the RADR algorithm significantly enhances the resilience of the supply chain. Particularly in the case study of high congestion scenarios, our method reduces the potential congestion risk exposure by 19.3% while only increasing the transportation distance by 2.1%. This empirical evidence confirms that the proposed data-driven approach can effectively balance delivery efficiency and operational safety.
FairDRL-ST: Disentangled Representation Learning for Fair Spatio-Temporal Mobility Prediction
Aug 11, 2025As deep spatio-temporal neural networks are increasingly utilised in urban computing contexts, the deployment of such methods can have a direct impact on users of critical urban infrastructure, such as public transport, emergency services, and traffic management systems. While many spatio-temporal methods focus on improving accuracy, fairness has recently gained attention due to growing evidence that biased predictions in spatio-temporal applications can disproportionately disadvantage certain demographic or geographic groups, thereby reinforcing existing socioeconomic inequalities and undermining the ethical deployment of AI in public services. In this paper, we propose a novel framework, FairDRL-ST, based on disentangled representation learning, to address fairness concerns in spatio-temporal prediction, with a particular focus on mobility demand forecasting. By leveraging adversarial learning and disentangled representation learning, our framework learns to separate attributes that contain sensitive information. Unlike existing methods that enforce fairness through supervised learning, which may lead to overcompensation and degraded performance, our framework achieves fairness in an unsupervised manner with minimal performance loss. We apply our framework to real-world urban mobility datasets and demonstrate its ability to close fairness gaps while delivering competitive predictive performance compared to state-of-the-art fairness-aware methods.
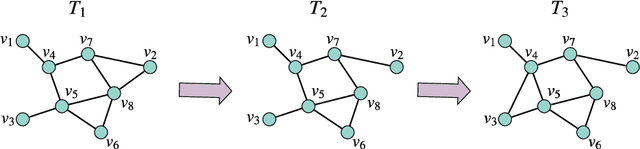
Measuring disentangled generative spatio-temporal representation
Feb 10, 2022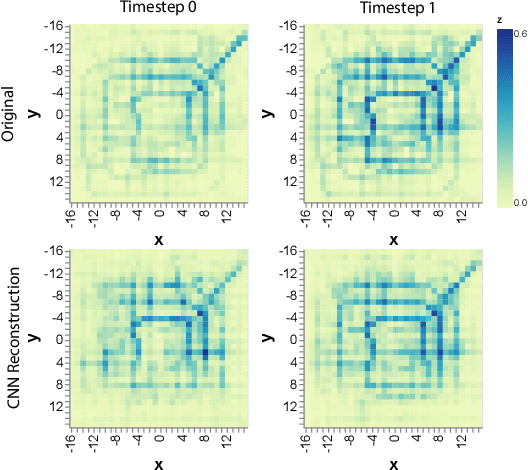
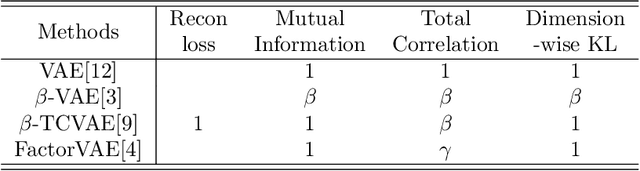


Disentangled representation learning offers useful properties such as dimension reduction and interpretability, which are essential to modern deep learning approaches. Although deep learning techniques have been widely applied to spatio-temporal data mining, there has been little attention to further disentangle the latent features and understanding their contribution to the model performance, particularly their mutual information and correlation across features. In this study, we adopt two state-of-the-art disentangled representation learning methods and apply them to three large-scale public spatio-temporal datasets. To evaluate their performance, we propose an internal evaluation metric focusing on the degree of correlations among latent variables of the learned representations and the prediction performance of the downstream tasks. Empirical results show that our modified method can learn disentangled representations that achieve the same level of performance as existing state-of-the-art ST deep learning methods in a spatio-temporal sequence forecasting problem. Additionally, we find that our methods can be used to discover real-world spatial-temporal semantics to describe the variables in the learned representation.
Predicting Flight Delay with Spatio-Temporal Trajectory Convolutional Network and Airport Situational Awareness Map
May 19, 2021
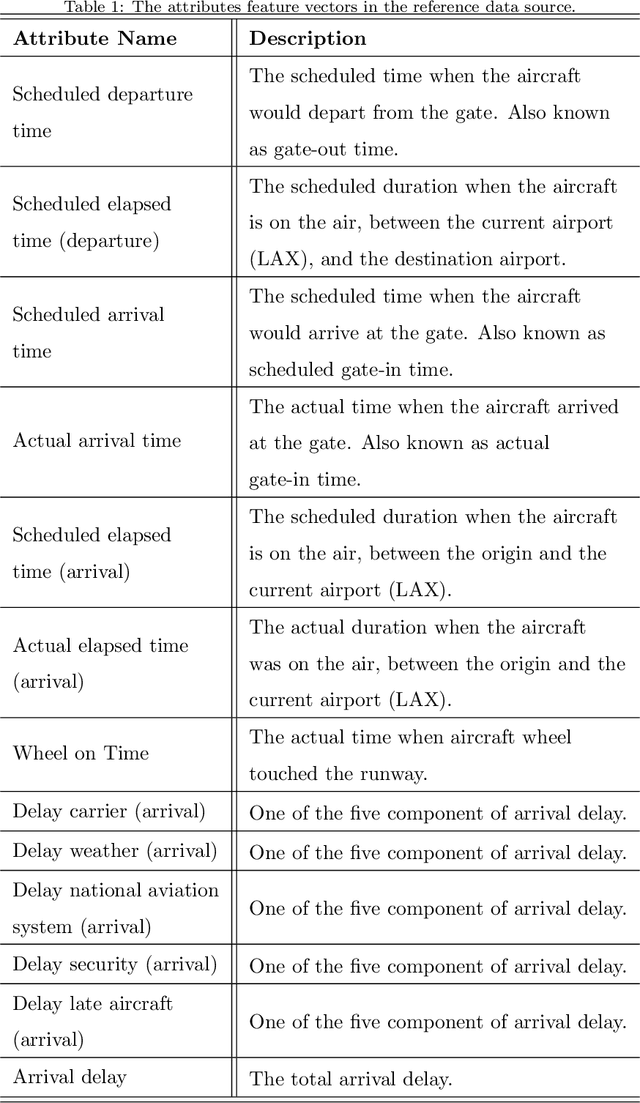


To model and forecast flight delays accurately, it is crucial to harness various vehicle trajectory and contextual sensor data on airport tarmac areas. These heterogeneous sensor data, if modelled correctly, can be used to generate a situational awareness map. Existing techniques apply traditional supervised learning methods onto historical data, contextual features and route information among different airports to predict flight delay are inaccurate and only predict arrival delay but not departure delay, which is essential to airlines. In this paper, we propose a vision-based solution to achieve a high forecasting accuracy, applicable to the airport. Our solution leverages a snapshot of the airport situational awareness map, which contains various trajectories of aircraft and contextual features such as weather and airline schedules. We propose an end-to-end deep learning architecture, TrajCNN, which captures both the spatial and temporal information from the situational awareness map. Additionally, we reveal that the situational awareness map of the airport has a vital impact on estimating flight departure delay. Our proposed framework obtained a good result (around 18 minutes error) for predicting flight departure delay at Los Angeles International Airport.
Generative Adversarial Networks for Spatio-temporal Data: A Survey
Aug 18, 2020
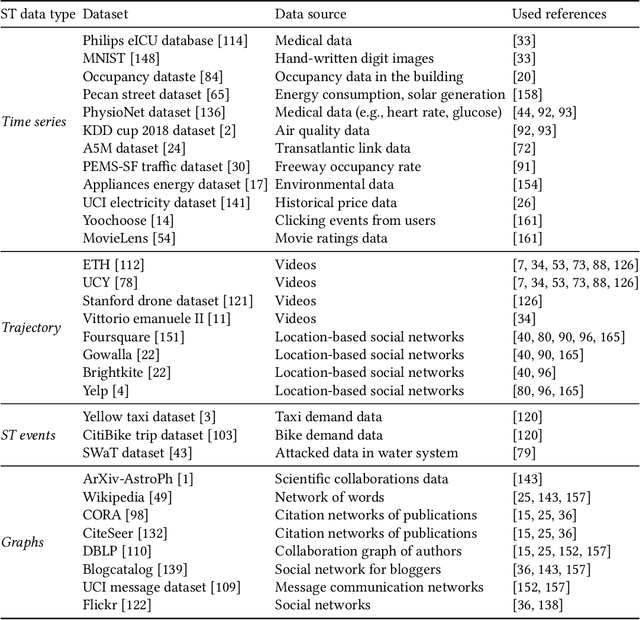
Generative Adversarial Networks (GANs) have shown remarkable success in the computer vision area for producing realistic-looking images. Recently, GAN-based techniques are shown to be promising for spatiotemporal-based applications such as trajectory prediction, events generation and time-series data imputation. While several reviews for GANs in computer vision been presented, nobody has considered addressing the practical applications and challenges relevant to spatio-temporal data. In this paper, we conduct a comprehensive review of the recent developments of GANs in spatio-temporal data. we summarise the popular GAN architectures in spatio-temporal data and common practices for evaluating the performance of spatio-temporal applications with GANs. In the end, we point out the future directions with the hope of benefiting researchers interested in this area.
FADACS: A Few-shot Adversarial Domain Adaptation Architecture for Context-Aware Parking Availability Sensing
Jul 13, 2020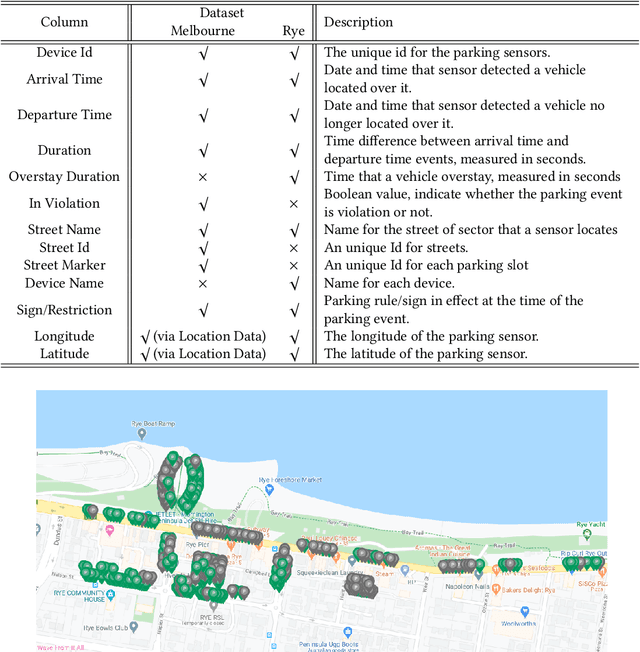
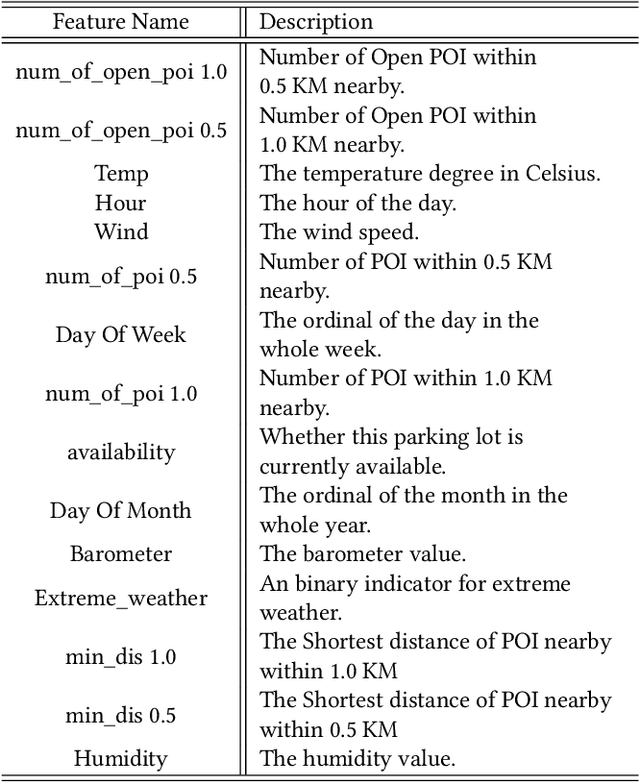
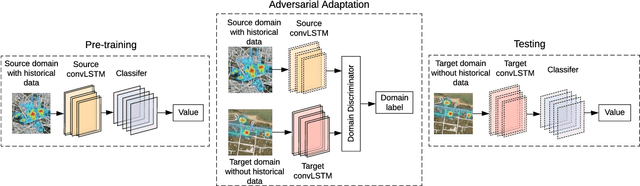
The existing research on parking availability sensing mainly relies on extensive contextual and historical information. In practice, it is challenging to have such information available as it requires continuous collection of sensory signals. In this paper, we design an end-to-end transfer learning framework for parking availability sensing to predict the parking occupancy in areas where the parking data is insufficient to feed into data-hungry models. This framework overcomes two main challenges: 1) many real-world cases cannot provide enough data for most existing data-driven models. 2) it is difficult to merge sensor data and heterogeneous contextual information due to the differing urban fabric and spatial characteristics. Our work adopts a widely-used concept called adversarial domain adaptation to predict the parking occupancy in an area without abundant sensor data by leveraging data from other areas with similar features. In this paper, we utilise more than 35 million parking data records from sensors placed in two different cities, one is a city centre, and another one is a coastal tourist town. We also utilise heterogeneous spatio-temporal contextual information from external resources including weather and point of interests. We quantify the strength of our proposed framework in different cases and compare it to the existing data-driven approaches. The results show that the proposed framework outperforms existing methods and also provide a few valuable insights for parking availability prediction.