 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Multiple Missing Values-resistant Unsupervised Graph Anomaly Detection
Nov 13, 2025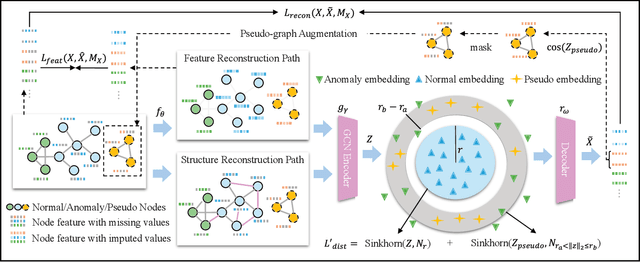
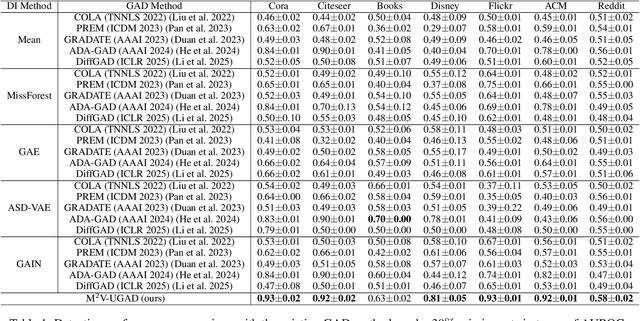
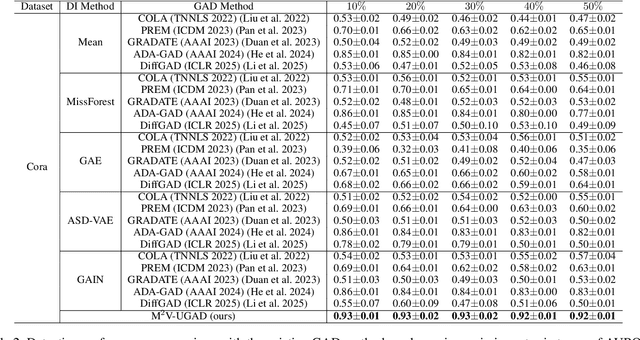

Unsupervised graph anomaly detection (GAD) has received increasing attention in recent years, which aims to identify data anomalous patterns utilizing only unlabeled node information from graph-structured data. However, prevailing unsupervised GAD methods typically presuppose complete node attributes and structure information, a condition hardly satisfied in real-world scenarios owing to privacy, collection errors or dynamic node arrivals. Existing standard imputation schemes risk "repairing" rare anomalous nodes so that they appear normal, thereby introducing imputation bias into the detection process. In addition, when both node attributes and edges are missing simultaneously, estimation errors in one view can contaminate the other, causing cross-view interference that further undermines the detection performance. To overcome these challenges, we propose M$^2$V-UGAD, a multiple missing values-resistant unsupervised GAD framework on incomplete graphs. Specifically, a dual-pathway encoder is first proposed to independently reconstruct missing node attributes and graph structure, thereby preventing errors in one view from propagating to the other. The two pathways are then fused and regularized in a joint latent space so that normals occupy a compact inner manifold while anomalies reside on an outer shell. Lastly, to mitigate imputation bias, we sample latent codes just outside the normal region and decode them into realistic node features and subgraphs, providing hard negative examples that sharpen the decision boundary. Experiments on seven public benchmarks demonstrate that M$^2$V-UGAD consistently outperforms existing unsupervised GAD methods across varying missing rates.
Towards Effective Open-set Graph Class-incremental Learning
Jul 23, 2025Graph class-incremental learning (GCIL) allows graph neural networks (GNNs) to adapt to evolving graph analytical tasks by incrementally learning new class knowledge while retaining knowledge of old classes. Existing GCIL methods primarily focus on a closed-set assumption, where all test samples are presumed to belong to previously known classes. Such an assumption restricts their applicability in real-world scenarios, where unknown classes naturally emerge during inference, and are absent during training. In this paper, we explore a more challenging open-set graph class-incremental learning scenario with two intertwined challenges: catastrophic forgetting of old classes, which impairs the detection of unknown classes, and inadequate open-set recognition, which destabilizes the retention of learned knowledge. To address the above problems, a novel OGCIL framework is proposed, which utilizes pseudo-sample embedding generation to effectively mitigate catastrophic forgetting and enable robust detection of unknown classes. To be specific, a prototypical conditional variational autoencoder is designed to synthesize node embeddings for old classes, enabling knowledge replay without storing raw graph data. To handle unknown classes, we employ a mixing-based strategy to generate out-of-distribution (OOD) samples from pseudo in-distribution and current node embeddings. A novel prototypical hypersphere classification loss is further proposed, which anchors in-distribution embeddings to their respective class prototypes, while repelling OOD embeddings away. Instead of assigning all unknown samples into one cluster, our proposed objective function explicitly models them as outliers through prototype-aware rejection regions, ensuring a robust open-set recognition. Extensive experiments on five benchmarks demonstrate the effectiveness of OGCIL over existing GCIL and open-set GNN methods.
Semi-supervised Anomaly Detection with Extremely Limited Labels in Dynamic Graphs
Jan 25, 2025Semi-supervised graph anomaly detection (GAD) has recently received increasing attention, which aims to distinguish anomalous patterns from graphs under the guidance of a moderate amount of labeled data and a large volume of unlabeled data. Although these proposed semi-supervised GAD methods have achieved great success, their superior performance will be seriously degraded when the provided labels are extremely limited due to some unpredictable factors. Besides, the existing methods primarily focus on anomaly detection in static graphs, and little effort was paid to consider the continuous evolution characteristic of graphs over time (dynamic graphs). To address these challenges, we propose a novel GAD framework (EL$^{2}$-DGAD) to tackle anomaly detection problem in dynamic graphs with extremely limited labels. Specifically, a transformer-based graph encoder model is designed to more effectively preserve evolving graph structures beyond the local neighborhood. Then, we incorporate an ego-context hypersphere classification loss to classify temporal interactions according to their structure and temporal neighborhoods while ensuring the normal samples are mapped compactly against anomalous data. Finally, the above loss is further augmented with an ego-context contrasting module which utilizes unlabeled data to enhance model generalization. Extensive experiments on four datasets and three label rates demonstrate the effectiveness of the proposed method in comparison to the existing GAD methods.
Towards Cross-domain Few-shot Graph Anomaly Detection
Oct 11, 2024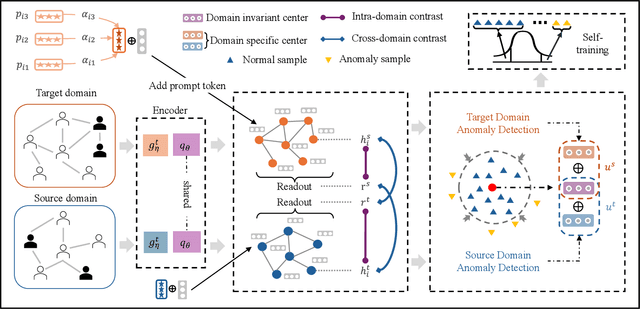
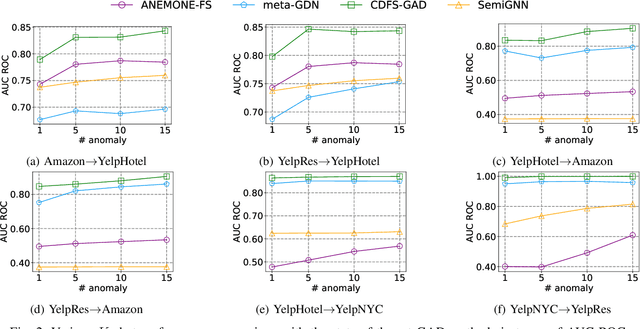
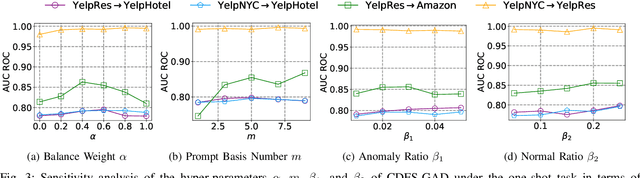
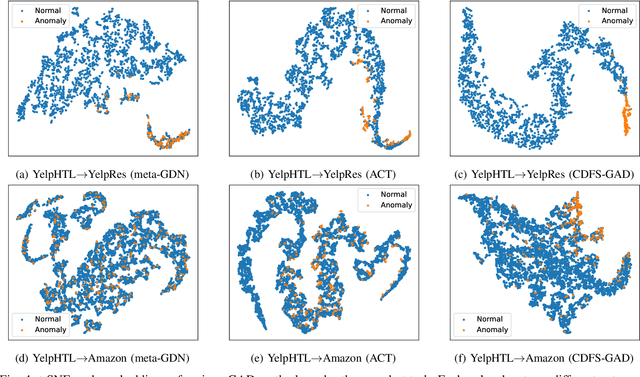
Few-shot graph anomaly detection (GAD) has recently garnered increasing attention, which aims to discern anomalous patterns among abundant unlabeled test nodes under the guidance of a limited number of labeled training nodes. Existing few-shot GAD approaches typically adopt meta-training methods trained on richly labeled auxiliary networks to facilitate rapid adaptation to target networks that possess sparse labels. However, these proposed methods often assume that the auxiliary and target networks exist in the same data distributions-an assumption rarely holds in practical settings. This paper explores a more prevalent and complex scenario of cross-domain few-shot GAD, where the goal is to identify anomalies within sparsely labeled target graphs using auxiliary graphs from a related, yet distinct domain. The challenge here is nontrivial owing to inherent data distribution discrepancies between the source and target domains, compounded by the uncertainties of sparse labeling in the target domain. In this paper, we propose a simple and effective framework, termed CDFS-GAD, specifically designed to tackle the aforementioned challenges. CDFS-GAD first introduces a domain-adaptive graph contrastive learning module, which is aimed at enhancing cross-domain feature alignment. Then, a prompt tuning module is further designed to extract domain-specific features tailored to each domain. Moreover, a domain-adaptive hypersphere classification loss is proposed to enhance the discrimination between normal and anomalous instances under minimal supervision, utilizing domain-sensitive norms. Lastly, a self-training strategy is introduced to further refine the predicted scores, enhancing its reliability in few-shot settings. Extensive experiments on twelve real-world cross-domain data pairs demonstrate the effectiveness of the proposed CDFS-GAD framework in comparison to various existing GAD methods.
Towards Unsupervised Graph Completion Learning on Graphs with Features and Structure Missing
Sep 06, 2023



In recent years, graph neural networks (GNN) have achieved significant developments in a variety of graph analytical tasks. Nevertheless, GNN's superior performance will suffer from serious damage when the collected node features or structure relationships are partially missing owning to numerous unpredictable factors. Recently emerged graph completion learning (GCL) has received increasing attention, which aims to reconstruct the missing node features or structure relationships under the guidance of a specifically supervised task. Although these proposed GCL methods have made great success, they still exist the following problems: the reliance on labels, the bias of the reconstructed node features and structure relationships. Besides, the generalization ability of the existing GCL still faces a huge challenge when both collected node features and structure relationships are partially missing at the same time. To solve the above issues, we propose a more general GCL framework with the aid of self-supervised learning for improving the task performance of the existing GNN variants on graphs with features and structure missing, termed unsupervised GCL (UGCL). Specifically, to avoid the mismatch between missing node features and structure during the message-passing process of GNN, we separate the feature reconstruction and structure reconstruction and design its personalized model in turn. Then, a dual contrastive loss on the structure level and feature level is introduced to maximize the mutual information of node representations from feature reconstructing and structure reconstructing paths for providing more supervision signals. Finally, the reconstructed node features and structure can be applied to the downstream node classification task. Extensive experiments on eight datasets, three GNN variants and five missing rates demonstrate the effectiveness of our proposed method.
Semantic-visual Guided Transformer for Few-shot Class-incremental Learning
Mar 27, 2023



Few-shot class-incremental learning (FSCIL) has recently attracted extensive attention in various areas. Existing FSCIL methods highly depend on the robustness of the feature backbone pre-trained on base classes. In recent years, different Transformer variants have obtained significant processes in the feature representation learning of massive fields. Nevertheless, the progress of the Transformer in FSCIL scenarios has not achieved the potential promised in other fields so far. In this paper, we develop a semantic-visual guided Transformer (SV-T) to enhance the feature extracting capacity of the pre-trained feature backbone on incremental classes. Specifically, we first utilize the visual (image) labels provided by the base classes to supervise the optimization of the Transformer. And then, a text encoder is introduced to automatically generate the corresponding semantic (text) labels for each image from the base classes. Finally, the constructed semantic labels are further applied to the Transformer for guiding its hyperparameters updating. Our SV-T can take full advantage of more supervision information from base classes and further enhance the training robustness of the feature backbone. More importantly, our SV-T is an independent method, which can directly apply to the existing FSCIL architectures for acquiring embeddings of various incremental classes. Extensive experiments on three benchmarks, two FSCIL architectures, and two Transformer variants show that our proposed SV-T obtains a significant improvement in comparison to the existing state-of-the-art FSCIL methods.
Self-supervised Guided Hypergraph Feature Propagation for Semi-supervised Classification with Missing Node Features
Feb 16, 2023

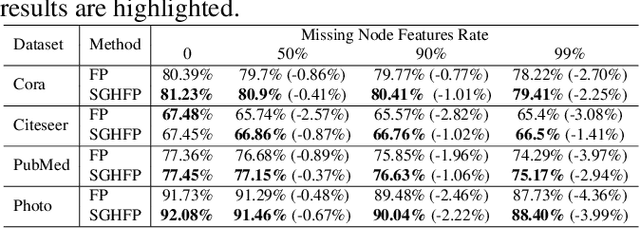

Graph neural networks (GNNs) with missing node features have recently received increasing interest. Such missing node features seriously hurt the performance of the existing GNNs. Some recent methods have been proposed to reconstruct the missing node features by the information propagation among nodes with known and unknown attributes. Although these methods have achieved superior performance, how to exactly exploit the complex data correlations among nodes to reconstruct missing node features is still a great challenge. To solve the above problem, we propose a self-supervised guided hypergraph feature propagation (SGHFP). Specifically, the feature hypergraph is first generated according to the node features with missing information. And then, the reconstructed node features produced by the previous iteration are fed to a two-layer GNNs to construct a pseudo-label hypergraph. Before each iteration, the constructed feature hypergraph and pseudo-label hypergraph are fused effectively, which can better preserve the higher-order data correlations among nodes. After then, we apply the fused hypergraph to the feature propagation for reconstructing missing features. Finally, the reconstructed node features by multi-iteration optimization are applied to the downstream semi-supervised classification task. Extensive experiments demonstrate that the proposed SGHFP outperforms the existing semi-supervised classification with missing node feature methods.