 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysInOne: Visual Physics Learning and Reasoning in One Suite
Apr 10, 2026We present PhysInOne, a large-scale synthetic dataset addressing the critical scarcity of physically-grounded training data for AI systems. Unlike existing datasets limited to merely hundreds or thousands of examples, PhysInOne provides 2 million videos across 153,810 dynamic 3D scenes, covering 71 basic physical phenomena in mechanics, optics, fluid dynamics, and magnetism. Distinct from previous works, our scenes feature multiobject interactions against complex backgrounds, with comprehensive ground-truth annotations including 3D geometry, semantics, dynamic motion, physical properties, and text descriptions. We demonstrate PhysInOne's efficacy across four emerging applications: physics-aware video generation, long-/short-term future frame prediction, physical property estimation, and motion transfer. Experiments show that fine-tuning foundation models on PhysInOne significantly enhances physical plausibility, while also exposing critical gaps in modeling complex physical dynamics and estimating intrinsic properties. As the largest dataset of its kind, orders of magnitude beyond prior works, PhysInOne establishes a new benchmark for advancing physics-grounded world models in generation, simulation, and embodied AI.
Improving Multi-View Reconstruction via Texture-Guided Gaussian-Mesh Joint Optimization
Nov 06, 2025Reconstructing real-world objects from multi-view images is essential for applications in 3D editing, AR/VR, and digital content creation. Existing methods typically prioritize either geometric accuracy (Multi-View Stereo) or photorealistic rendering (Novel View Synthesis), often decoupling geometry and appearance optimization, which hinders downstream editing tasks. This paper advocates an unified treatment on geometry and appearance optimization for seamless Gaussian-mesh joint optimization. More specifically, we propose a novel framework that simultaneously optimizes mesh geometry (vertex positions and faces) and vertex colors via Gaussian-guided mesh differentiable rendering, leveraging photometric consistency from input images and geometric regularization from normal and depth maps. The obtained high-quality 3D reconstruction can be further exploit in down-stream editing tasks, such as relighting and shape deformation. The code will be publicly available upon acceptance.
Auto-Connect: Connectivity-Preserving RigFormer with Direct Preference Optimization
Jun 13, 2025



We introduce Auto-Connect, a novel approach for automatic rigging that explicitly preserves skeletal connectivity through a connectivity-preserving tokenization scheme. Unlike previous methods that predict bone positions represented as two joints or first predict points before determining connectivity, our method employs special tokens to define endpoints for each joint's children and for each hierarchical layer, effectively automating connectivity relationships. This approach significantly enhances topological accuracy by integrating connectivity information directly into the prediction framework. To further guarantee high-quality topology, we implement a topology-aware reward function that quantifies topological correctness, which is then utilized in a post-training phase through reward-guided Direct Preference Optimization. Additionally, we incorporate implicit geodesic features for latent top-k bone selection, which substantially improves skinning quality. By leveraging geodesic distance information within the model's latent space, our approach intelligently determines the most influential bones for each vertex, effectively mitigating common skinning artifacts. This combination of connectivity-preserving tokenization, reward-guided fine-tuning, and geodesic-aware bone selection enables our model to consistently generate more anatomically plausible skeletal structures with superior deformation properties.
ARMO: Autoregressive Rigging for Multi-Category Objects
Mar 26, 2025Recent advancements in large-scale generative models have significantly improved the quality and diversity of 3D shape generation. However, most existing methods focus primarily on generating static 3D models, overlooking the potentially dynamic nature of certain shapes, such as humanoids, animals, and insects. To address this gap, we focus on rigging, a fundamental task in animation that establishes skeletal structures and skinning for 3D models. In this paper, we introduce OmniRig, the first large-scale rigging dataset, comprising 79,499 meshes with detailed skeleton and skinning information. Unlike traditional benchmarks that rely on predefined standard poses (e.g., A-pose, T-pose), our dataset embraces diverse shape categories, styles, and poses. Leveraging this rich dataset, we propose ARMO, a novel rigging framework that utilizes an autoregressive model to predict both joint positions and connectivity relationships in a unified manner. By treating the skeletal structure as a complete graph and discretizing it into tokens, we encode the joints using an auto-encoder to obtain a latent embedding and an autoregressive model to predict the tokens. A mesh-conditioned latent diffusion model is used to predict the latent embedding for conditional skeleton generation. Our method addresses the limitations of regression-based approaches, which often suffer from error accumulation and suboptimal connectivity estimation. Through extensive experiments on the OmniRig dataset, our approach achieves state-of-the-art performance in skeleton prediction, demonstrating improved generalization across diverse object categories. The code and dataset will be made public for academic use upon acceptance.
DRiVE: Diffusion-based Rigging Empowers Generation of Versatile and Expressive Characters
Nov 26, 2024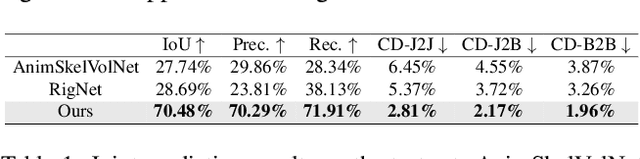
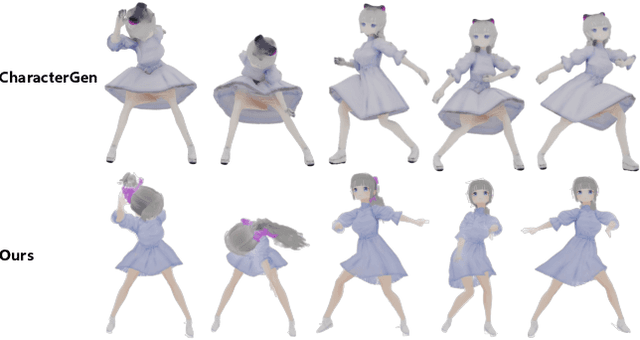

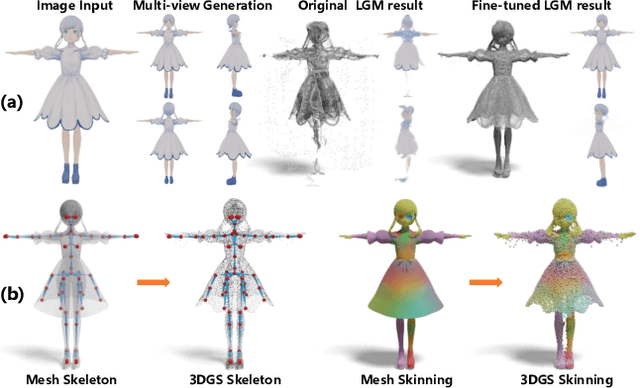
Recent advances in generative models have enabled high-quality 3D character reconstruction from multi-modal. However, animating these generated characters remains a challenging task, especially for complex elements like garments and hair, due to the lack of large-scale datasets and effective rigging methods. To address this gap, we curate AnimeRig, a large-scale dataset with detailed skeleton and skinning annotations. Building upon this, we propose DRiVE, a novel framework for generating and rigging 3D human characters with intricate structures. Unlike existing methods, DRiVE utilizes a 3D Gaussian representation, facilitating efficient animation and high-quality rendering. We further introduce GSDiff, a 3D Gaussian-based diffusion module that predicts joint positions as spatial distributions, overcoming the limitations of regression-based approaches. Extensive experiments demonstrate that DRiVE achieves precise rigging results, enabling realistic dynamics for clothing and hair, and surpassing previous methods in both quality and versatility. The code and dataset will be made public for academic use upon acceptance.
SRIF: Semantic Shape Registration Empowered by Diffusion-based Image Morphing and Flow Estimation
Sep 18, 2024
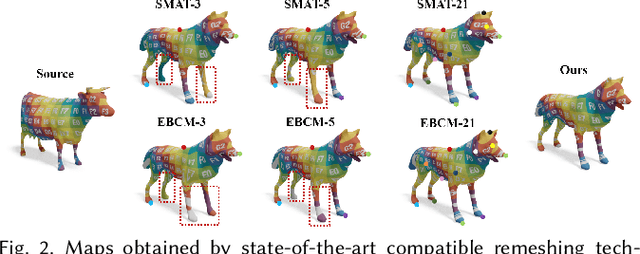
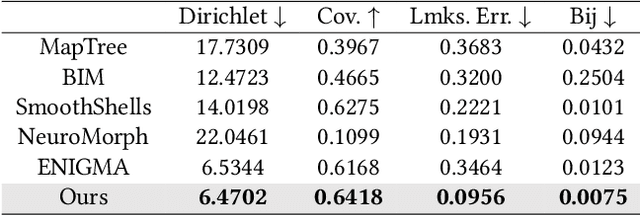
In this paper, we propose SRIF, a novel Semantic shape Registration framework based on diffusion-based Image morphing and Flow estimation. More concretely, given a pair of extrinsically aligned shapes, we first render them from multi-views, and then utilize an image interpolation framework based on diffusion models to generate sequences of intermediate images between them. The images are later fed into a dynamic 3D Gaussian splatting framework, with which we reconstruct and post-process for intermediate point clouds respecting the image morphing processing. In the end, tailored for the above, we propose a novel registration module to estimate continuous normalizing flow, which deforms source shape consistently towards the target, with intermediate point clouds as weak guidance. Our key insight is to leverage large vision models (LVMs) to associate shapes and therefore obtain much richer semantic information on the relationship between shapes than the ad-hoc feature extraction and alignment. As a consequence, SRIF achieves high-quality dense correspondences on challenging shape pairs, but also delivers smooth, semantically meaningful interpolation in between. Empirical evidence justifies the effectiveness and superiority of our method as well as specific design choices. The code is released at https://github.com/rqhuang88/SRIF.
Spatially and Spectrally Consistent Deep Functional Maps
Sep 05, 2023Cycle consistency has long been exploited as a powerful prior for jointly optimizing maps within a collection of shapes. In this paper, we investigate its utility in the approaches of Deep Functional Maps, which are considered state-of-the-art in non-rigid shape matching. We first justify that under certain conditions, the learned maps, when represented in the spectral domain, are already cycle consistent. Furthermore, we identify the discrepancy that spectrally consistent maps are not necessarily spatially, or point-wise, consistent. In light of this, we present a novel design of unsupervised Deep Functional Maps, which effectively enforces the harmony of learned maps under the spectral and the point-wise representation. By taking advantage of cycle consistency, our framework produces state-of-the-art results in mapping shapes even under significant distortions. Beyond that, by independently estimating maps in both spectral and spatial domains, our method naturally alleviates over-fitting in network training, yielding superior generalization performance and accuracy within an array of challenging tests for both near-isometric and non-isometric datasets. Codes are available at https://github.com/rqhuang88/Spatiallyand-Spectrally-Consistent-Deep-Functional-Maps.