 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmark Grocery Dataset of Realworld Point Clouds From Single View
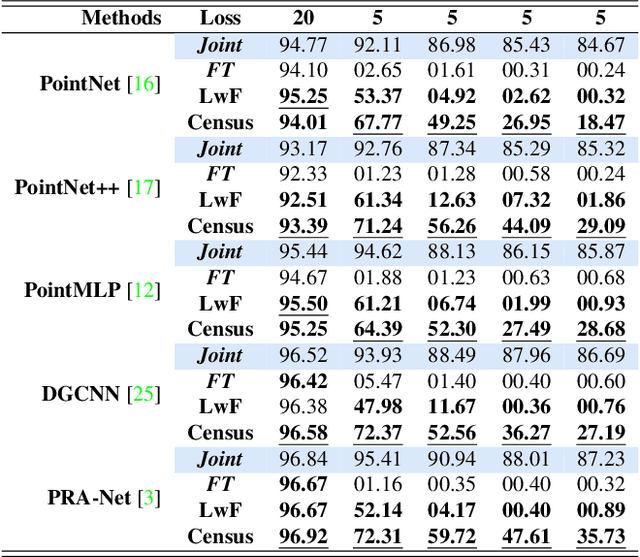
Feb 12, 2024Fine-grained grocery object recognition is an important computer vision problem with broad applications in automatic checkout, in-store robotic navigation, and assistive technologies for the visually impaired. Existing datasets on groceries are mainly 2D images. Models trained on these datasets are limited to learning features from the regular 2D grids. While portable 3D sensors such as Kinect were commonly available for mobile phones, sensors such as LiDAR and TrueDepth, have recently been integrated into mobile phones. Despite the availability of mobile 3D sensors, there are currently no dedicated real-world large-scale benchmark 3D datasets for grocery. In addition, existing 3D datasets lack fine-grained grocery categories and have limited training samples. Furthermore, collecting data by going around the object versus the traditional photo capture makes data collection cumbersome. Thus, we introduce a large-scale grocery dataset called 3DGrocery100. It constitutes 100 classes, with a total of 87,898 3D point clouds created from 10,755 RGB-D single-view images. We benchmark our dataset on six recent state-of-the-art 3D point cloud classification models. Additionally, we also benchmark the dataset on few-shot and continual learning point cloud classification tasks. Project Page: https://bigdatavision.org/3DGrocery100/.
PointCLIMB: An Exemplar-Free Point Cloud Class Incremental Benchmark
Apr 13, 2023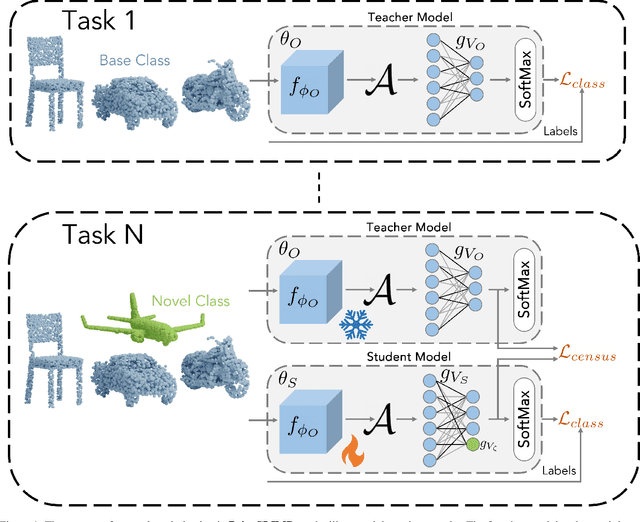


Point clouds offer comprehensive and precise data regarding the contour and configuration of objects. Employing such geometric and topological 3D information of objects in class incremental learning can aid endless application in 3D-computer vision. Well known 3D-point cloud class incremental learning methods for addressing catastrophic forgetting generally entail the usage of previously encountered data, which can present difficulties in situations where there are restrictions on memory or when there are concerns about the legality of the data. Towards this we pioneer to leverage exemplar free class incremental learning on Point Clouds. In this paper we propose PointCLIMB: An exemplar Free Class Incremental Learning Benchmark. We focus on a pragmatic perspective to consider novel classes for class incremental learning on 3D point clouds. We setup a benchmark for 3D Exemplar free class incremental learning. We investigate performance of various backbones on 3D-Exemplar Free Class Incremental Learning framework. We demonstrate our results on ModelNet40 dataset.
1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022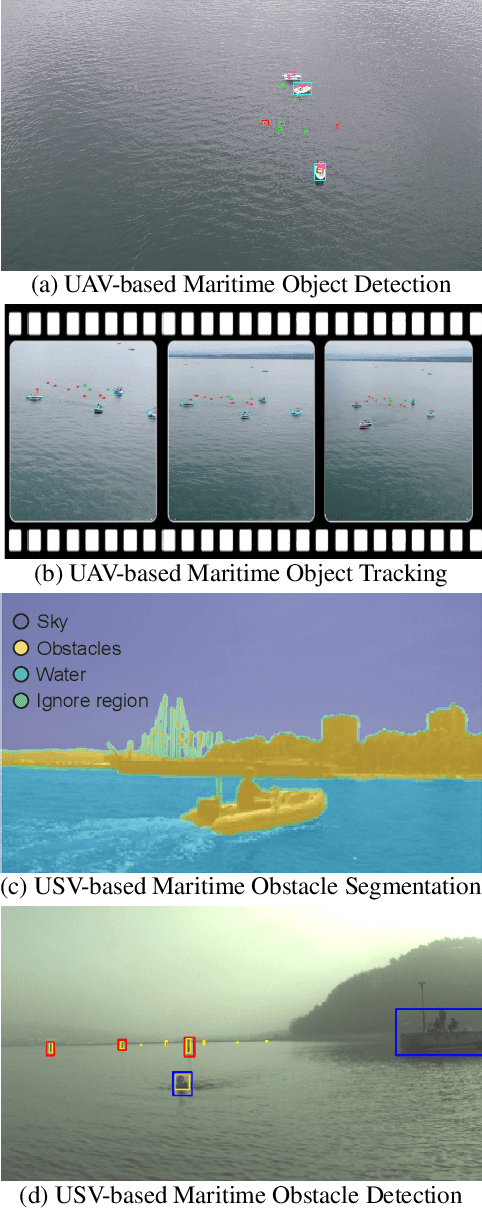
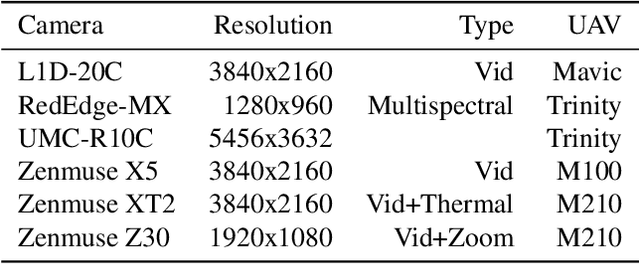
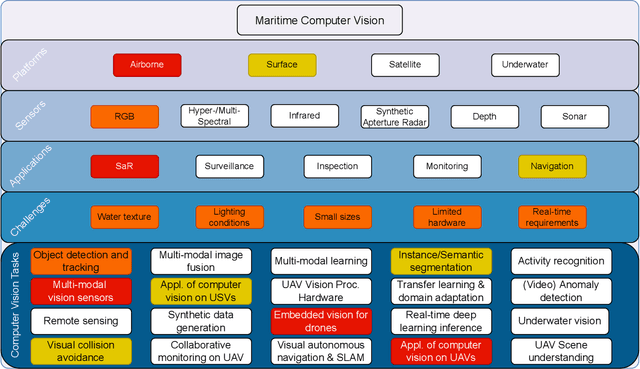
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.