 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTFFM: Topology-Aware Feature Fusion Module via Latent Graph Reasoning for Retinal Vessel Segmentation
Jan 27, 2026Precise segmentation of retinal arteries and veins carries the diagnosis of systemic cardiovascular conditions. However, standard convolutional architectures often yield topologically disjointed segmentations, characterized by gaps and discontinuities that render reliable graph-based clinical analysis impossible despite high pixel-level accuracy. To address this, we introduce a topology-aware framework engineered to maintain vascular connectivity. Our architecture fuses a Topological Feature Fusion Module (TFFM) that maps local feature representations into a latent graph space, deploying Graph Attention Networks to capture global structural dependencies often missed by fixed receptive fields. Furthermore, we drive the learning process with a hybrid objective function, coupling Tversky loss for class imbalance with soft clDice loss to explicitly penalize topological disconnects. Evaluation on the Fundus-AVSeg dataset reveals state-of-the-art performance, achieving a combined Dice score of 90.97% and a 95% Hausdorff Distance of 3.50 pixels. Notably, our method decreases vessel fragmentation by approximately 38% relative to baselines, yielding topologically coherent vascular trees viable for automated biomarker quantification. We open-source our code at https://tffm-module.github.io/.
Performance Analysis of Machine Learning Algorithms in Chronic Kidney Disease Prediction
Oct 10, 2025Kidneys are the filter of the human body. About 10% of the global population is thought to be affected by Chronic Kidney Disease (CKD), which causes kidney function to decline. To protect in danger patients from additional kidney damage, effective risk evaluation of CKD and appropriate CKD monitoring are crucial. Due to quick and precise detection capabilities, Machine Learning models can help practitioners accomplish this goal efficiently; therefore, an enormous number of diagnosis systems and processes in the healthcare sector nowadays are relying on machine learning due to its disease prediction capability. In this study, we designed and suggested disease predictive computer-aided designs for the diagnosis of CKD. The dataset for CKD is attained from the repository of machine learning of UCL, with a few missing values; those are filled in using "mean-mode" and "Random sampling method" strategies. After successfully achieving the missing data, eight ML techniques (Random Forest, SVM, Naive Bayes, Logistic Regression, KNN, XGBoost, Decision Tree, and AdaBoost) were used to establish models, and the performance evaluation comparisons among the result accuracies are measured by the techniques to find the machine learning models with the highest accuracy. Among them, Random Forest as well as Logistic Regression showed an outstanding 99% accuracy, followed by the Ada Boost, XGBoost, Naive Bayes, Decision Tree, and SVM, whereas the KNN classifier model stands last with an accuracy of 73%.
From Chat to Checkup: Can Large Language Models Assist in Diabetes Prediction?
Jun 17, 2025While Machine Learning (ML) and Deep Learning (DL) models have been widely used for diabetes prediction, the use of Large Language Models (LLMs) for structured numerical data is still not well explored. In this study, we test the effectiveness of LLMs in predicting diabetes using zero-shot, one-shot, and three-shot prompting methods. We conduct an empirical analysis using the Pima Indian Diabetes Database (PIDD). We evaluate six LLMs, including four open-source models: Gemma-2-27B, Mistral-7B, Llama-3.1-8B, and Llama-3.2-2B. We also test two proprietary models: GPT-4o and Gemini Flash 2.0. In addition, we compare their performance with three traditional machine learning models: Random Forest, Logistic Regression, and Support Vector Machine (SVM). We use accuracy, precision, recall, and F1-score as evaluation metrics. Our results show that proprietary LLMs perform better than open-source ones, with GPT-4o and Gemma-2-27B achieving the highest accuracy in few-shot settings. Notably, Gemma-2-27B also outperforms the traditional ML models in terms of F1-score. However, there are still issues such as performance variation across prompting strategies and the need for domain-specific fine-tuning. This study shows that LLMs can be useful for medical prediction tasks and encourages future work on prompt engineering and hybrid approaches to improve healthcare predictions.
A Survey on Efficient Vision-Language Models
Apr 13, 2025

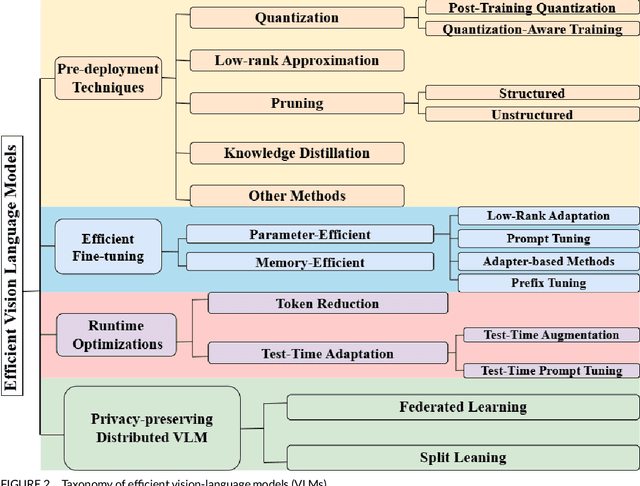

Vision-language models (VLMs) integrate visual and textual information, enabling a wide range of applications such as image captioning and visual question answering, making them crucial for modern AI systems. However, their high computational demands pose challenges for real-time applications. This has led to a growing focus on developing efficient vision language models. In this survey, we review key techniques for optimizing VLMs on edge and resource-constrained devices. We also explore compact VLM architectures, frameworks and provide detailed insights into the performance-memory trade-offs of efficient VLMs. Furthermore, we establish a GitHub repository at https://github.com/MPSCUMBC/Efficient-Vision-Language-Models-A-Survey to compile all surveyed papers, which we will actively update. Our objective is to foster deeper research in this area.
A Novel Ensemble-Based Deep Learning Model with Explainable AI for Accurate Kidney Disease Diagnosis
Dec 12, 2024Chronic Kidney Disease (CKD) represents a significant global health challenge, characterized by the progressive decline in renal function, leading to the accumulation of waste products and disruptions in fluid balance within the body. Given its pervasive impact on public health, there is a pressing need for effective diagnostic tools to enable timely intervention. Our study delves into the application of cutting-edge transfer learning models for the early detection of CKD. Leveraging a comprehensive and publicly available dataset, we meticulously evaluate the performance of several state-of-the-art models, including EfficientNetV2, InceptionNetV2, MobileNetV2, and the Vision Transformer (ViT) technique. Remarkably, our analysis demonstrates superior accuracy rates, surpassing the 90% threshold with MobileNetV2 and achieving 91.5% accuracy with ViT. Moreover, to enhance predictive capabilities further, we integrate these individual methodologies through ensemble modeling, resulting in our ensemble model exhibiting a remarkable 96% accuracy in the early detection of CKD. This significant advancement holds immense promise for improving clinical outcomes and underscores the critical role of machine learning in addressing complex medical challenges.
Prediction of Temperature and Rainfall in Bangladesh using Long Short Term Memory Recurrent Neural Networks
Oct 22, 2020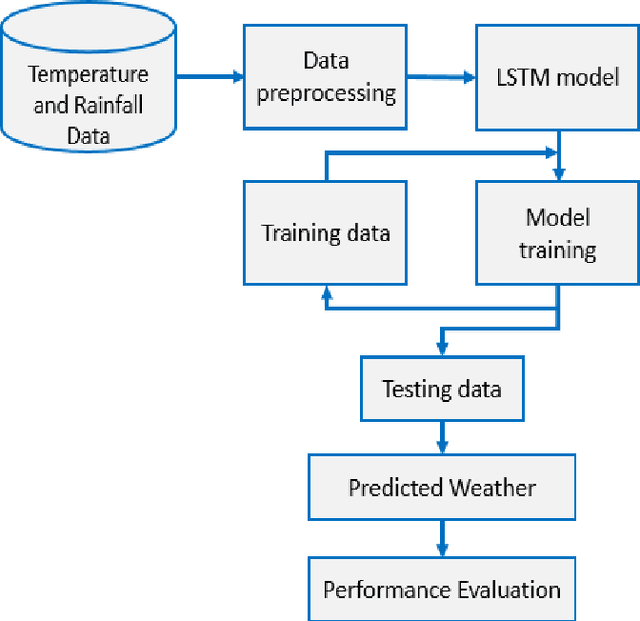
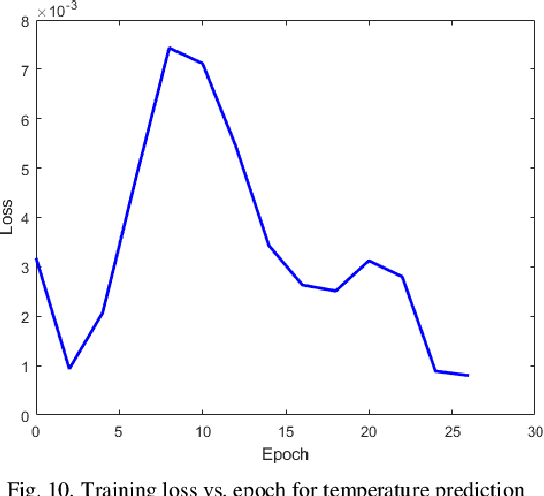
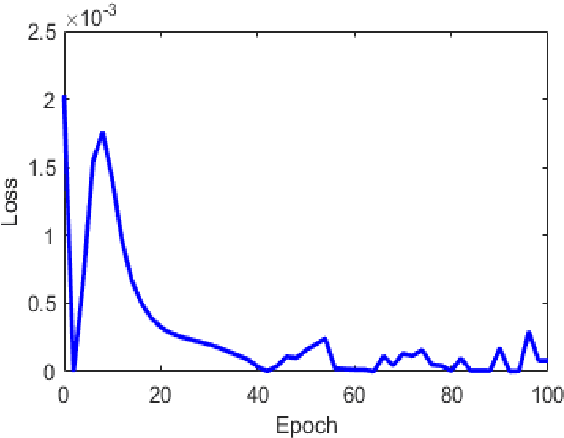
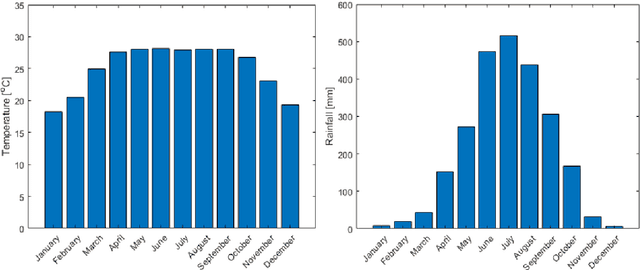
Temperature and rainfall have a significant impact on economic growth as well as the outbreak of seasonal diseases in a region. In spite of that inadequate studies have been carried out for analyzing the weather pattern of Bangladesh implementing the artificial neural network. Therefore, in this study, we are implementing a Long Short-term Memory (LSTM) model to forecast the month-wise temperature and rainfall by analyzing 115 years (1901-2015) of weather data of Bangladesh. The LSTM model has shown a mean error of -0.38oC in case of predicting the month-wise temperature for 2 years and -17.64mm in case of predicting the rainfall. This prediction model can help to understand the weather pattern changes as well as studying seasonal diseases of Bangladesh whose outbreaks are dependent on regional temperature and/or rainfall.
Deep Convolutional Neural Networks Model-based Brain Tumor Detection in Brain MRI Images
Oct 03, 2020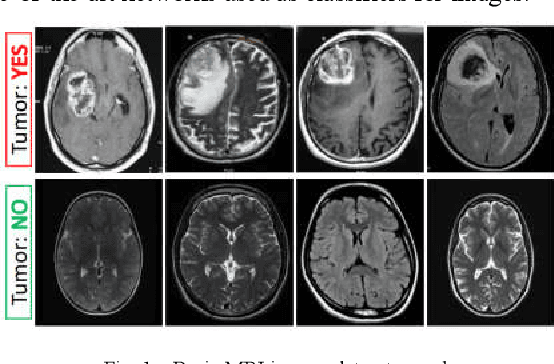
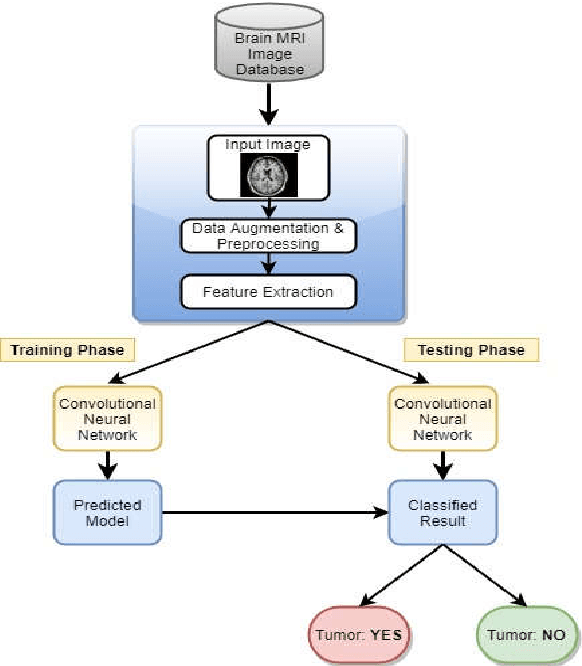
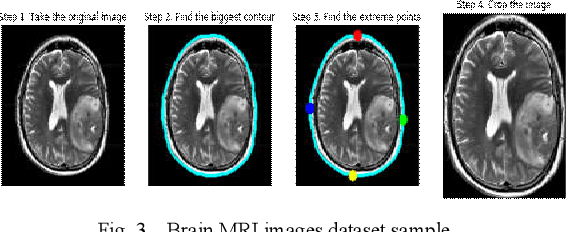
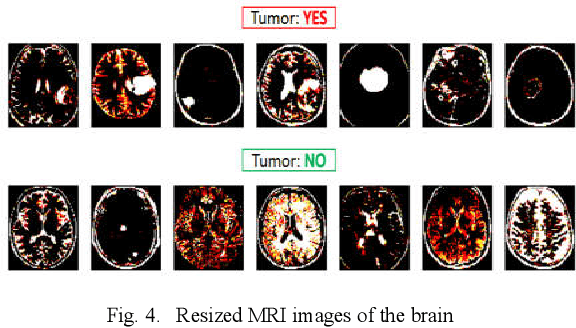
Diagnosing Brain Tumor with the aid of Magnetic Resonance Imaging (MRI) has gained enormous prominence over the years, primarily in the field of medical science. Detection and/or partitioning of brain tumors solely with the aid of MR imaging is achieved at the cost of immense time and effort and demands a lot of expertise from engaged personnel. This substantiates the necessity of fabricating an autonomous model brain tumor diagnosis. Our work involves implementing a deep convolutional neural network (DCNN) for diagnosing brain tumors from MR images. The dataset used in this paper consists of 253 brain MR images where 155 images are reported to have tumors. Our model can single out the MR images with tumors with an overall accuracy of 96%. The model outperformed the existing conventional methods for the diagnosis of brain tumor in the test dataset (Precision = 0.93, Sensitivity = 1.00, and F1-score = 0.97). Moreover, the proposed model's average precision-recall score is 0.93, Cohen's Kappa 0.91, and AUC 0.95. Therefore, the proposed model can help clinical experts verify whether the patient has a brain tumor and, consequently, accelerate the treatment procedure.
Performance Analysis of Deep Autoencoder and NCA Dimensionality Reduction Techniques with KNN, ENN and SVM Classifiers
Dec 24, 2019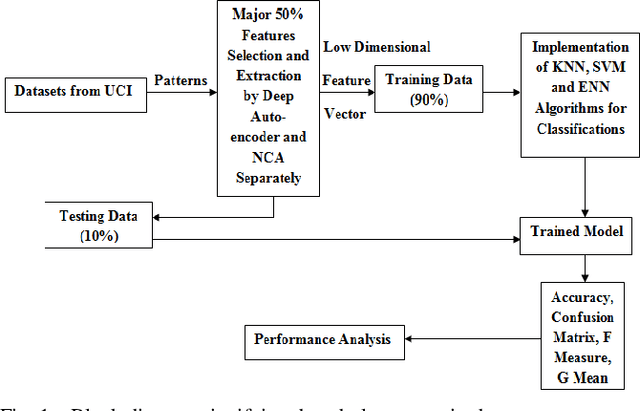
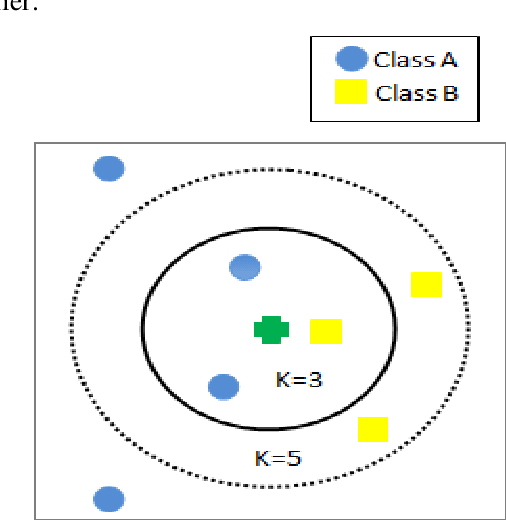
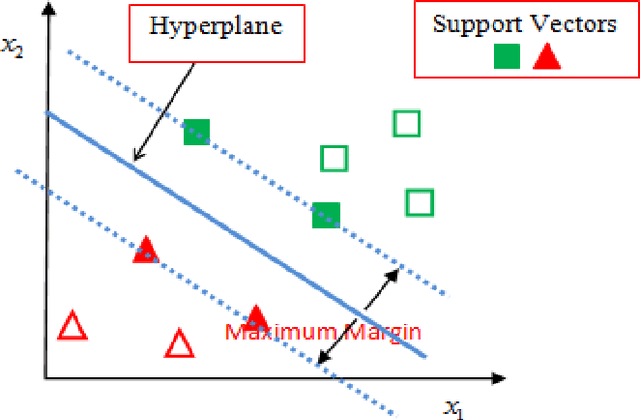
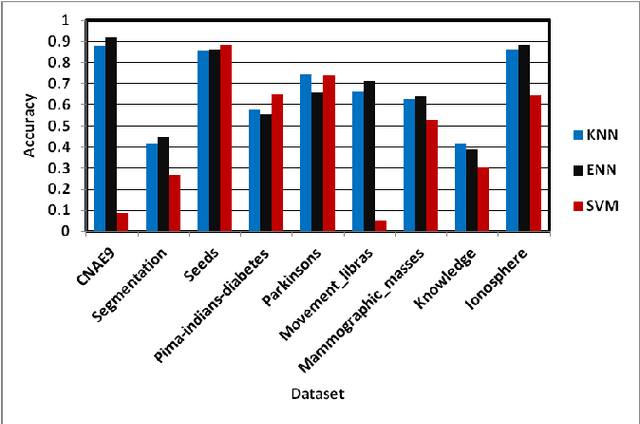
The central aim of this paper is to implement Deep Autoencoder and Neighborhood Components Analysis (NCA) dimensionality reduction methods in Matlab and to observe the application of these algorithms on nine unlike datasets from UCI machine learning repository. These datasets are CNAE9, Movement Libras, Pima Indians diabetes, Parkinsons, Knowledge, Segmentation, Seeds, Mammographic Masses, and Ionosphere. First of all, the dimension of these datasets has been reduced to fifty percent of their original dimension by selecting and extracting the most relevant and appropriate features or attributes using Deep Autoencoder and NCA dimensionality reduction techniques. Afterward, each dataset is classified applying K-Nearest Neighbors (KNN), Extended Nearest Neighbors (ENN) and Support Vector Machine (SVM) classification algorithms. All classification algorithms are developed in the Matlab environment. In each classification, the training test data ratio is always set to ninety percent: ten percent. Upon classification, variation between accuracies is observed and analyzed to find the degree of compatibility of each dimensionality reduction technique with each classifier and to evaluate each classifier performance on each dataset.
Non-Intrusive Electrical Appliances Monitoring and Classification using K-Nearest Neighbors
Nov 22, 2019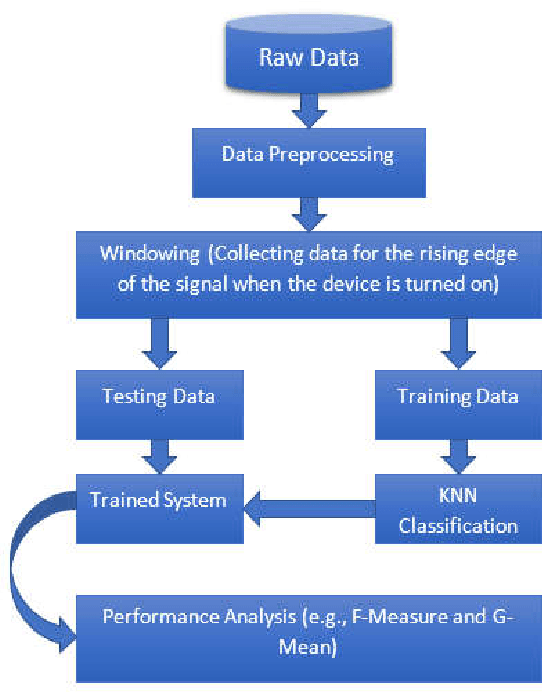
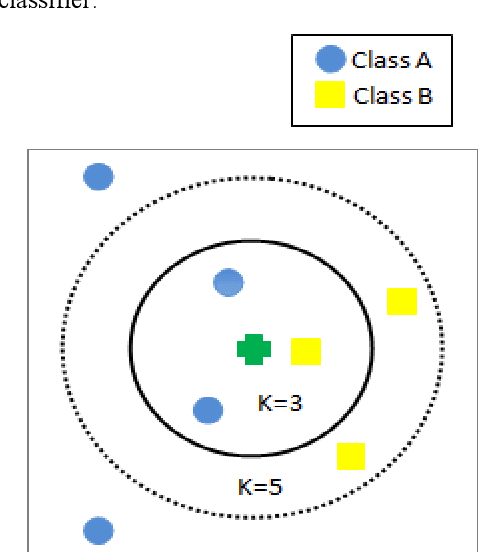
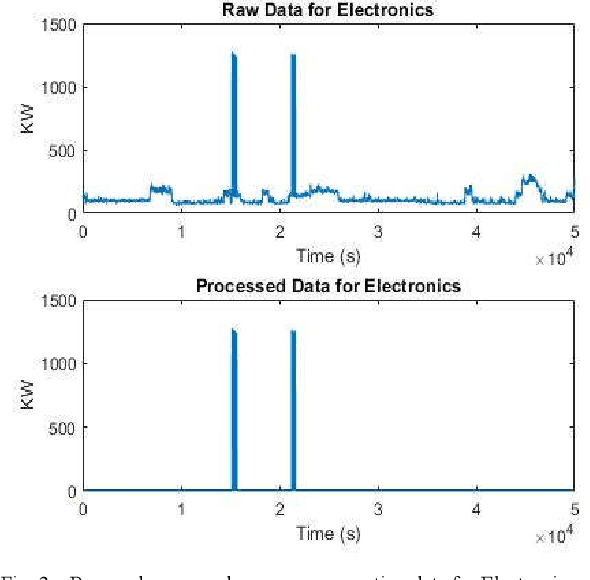
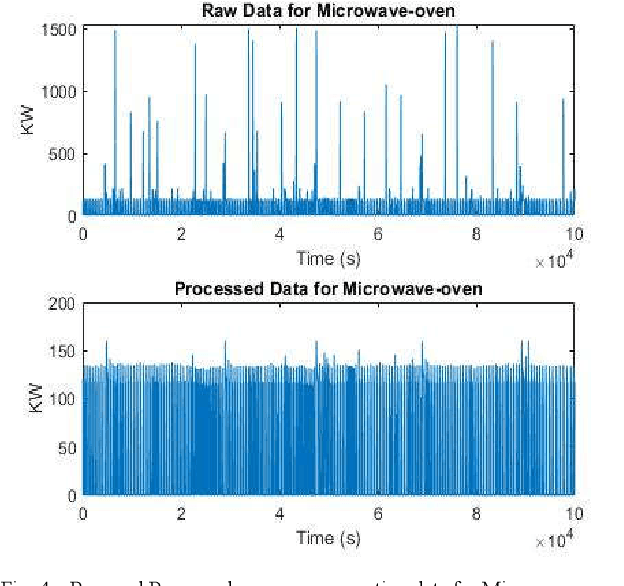
Non-Intrusive Load Monitoring (NILM) is the method of detecting an individual device's energy signal from an aggregated energy consumption signature [1]. As existing energy meters provide very little to no information regarding the energy consumption of individual appliances apart from the aggregated power rating, the spotting of individual appliances' energy usages by NILM will not only provide consumers the feedback of appliance-specific energy usage but also lead to the changes of their consumption behavior which facilitate energy conservation. B Neenan et al. [2] have demonstrated that direct individual appliance-specific energy usage signals lead to consumers' behavioral changes which improves energy efficiency by as much as 15%. Upon disaggregation of an energy signal, the signal needs to be classified according to the appropriate appliance. Hence, the goal of this paper is to disaggregate total energy consumption data to individual appliance signature and then classify appliance-specific energy loads using a prominent supervised classification method known as K-Nearest Neighbors (KNN). To perform this operation we have used a publicly accessible dataset of power signals from several houses known as the REDD dataset. Before applying KNN, data is preprocessed for each device. Then KNN is applied to check whether their energy consumption signature is separable or not. KNN is applied with K=5.
Recognition of Handwritten Digit using Convolutional Neural Network in Python with Tensorflow and Comparison of Performance for Various Hidden Layers
Sep 12, 2019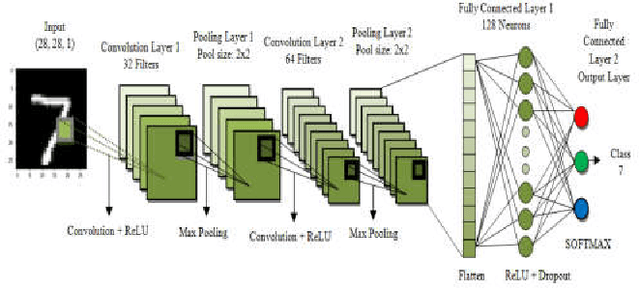
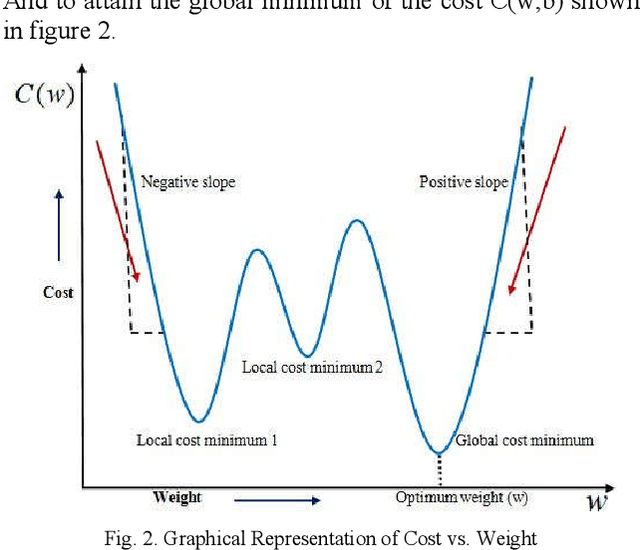
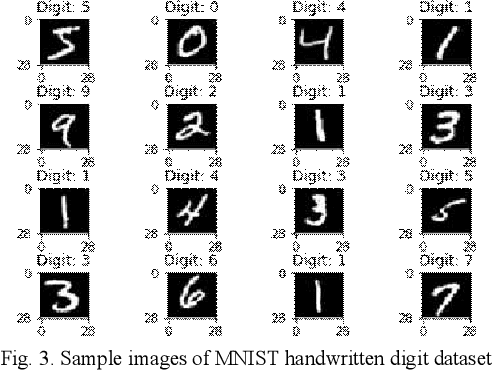
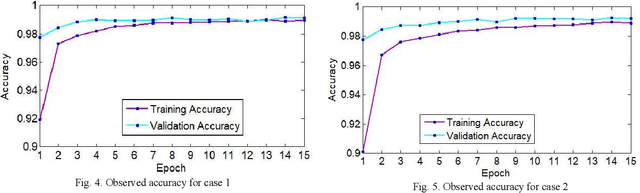
In recent times, with the increase of Artificial Neural Network (ANN), deep learning has brought a dramatic twist in the field of machine learning by making it more artificially intelligent. Deep learning is remarkably used in vast ranges of fields because of its diverse range of applications such as surveillance, health, medicine, sports, robotics, drones, etc. In deep learning, Convolutional Neural Network (CNN) is at the center of spectacular advances that mixes Artificial Neural Network (ANN) and up to date deep learning strategies. It has been used broadly in pattern recognition, sentence classification, speech recognition, face recognition, text categorization, document analysis, scene, and handwritten digit recognition. The goal of this paper is to observe the variation of accuracies of CNN to classify handwritten digits using various numbers of hidden layers and epochs and to make the comparison between the accuracies. For this performance evaluation of CNN, we performed our experiment using Modified National Institute of Standards and Technology (MNIST) dataset. Further, the network is trained using stochastic gradient descent and the backpropagation algorithm.