 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaze solving Algorithm for line following robot and derivation of linear path distance from nonlinear path
Jan 04, 2015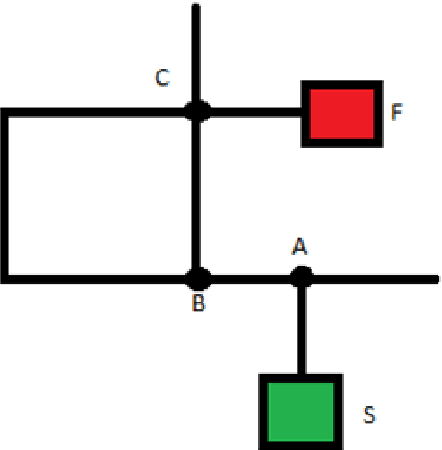
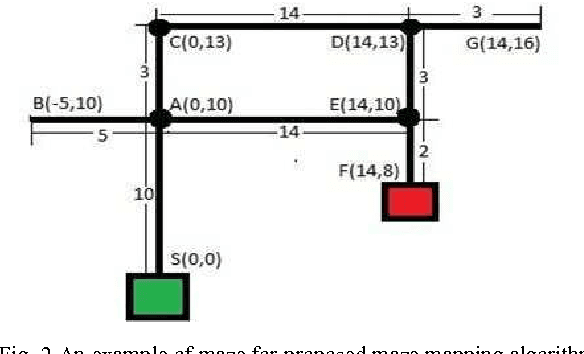

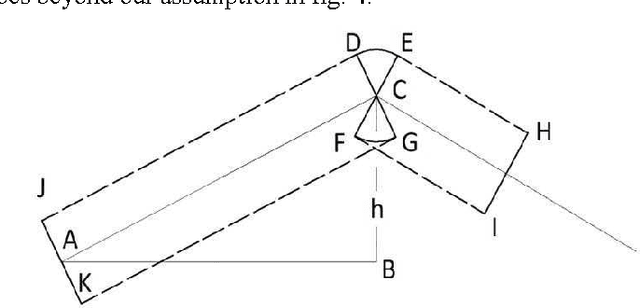
In this paper we have discussed a unique general algorithm for exploring and solving any kind of line maze with another simple one for simple mazes without loops or loops having highest two branches none of which are inward. For the general algorithm, we need a method to map the whole maze, which is required if the maze is complex. The proposed maze mapping system is based on coordinate system and after mapping the whole maze as a graph in standard 'Adjacency-list representation' method, shortest path and shortest time path was extracted using Dijkstra's algorithm. In order to find the coordinates of the turning points and junctions, linear distance between the points are needed, for which wheel encoder was used. However, due to non-linear movement of robot, the directly measured distance from the encoder has some error and to remove this error an idea is built up which ended by deriving equations that gives us almost exact linear distance between two points from the reading of wheel encoder of the robot moving in a non-linear path.