 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRank2Tell: A Multimodal Driving Dataset for Joint Importance Ranking and Reasoning
Sep 12, 2023The widespread adoption of commercial autonomous vehicles (AVs) and advanced driver assistance systems (ADAS) may largely depend on their acceptance by society, for which their perceived trustworthiness and interpretability to riders are crucial. In general, this task is challenging because modern autonomous systems software relies heavily on black-box artificial intelligence models. Towards this goal, this paper introduces a novel dataset, Rank2Tell, a multi-modal ego-centric dataset for Ranking the importance level and Telling the reason for the importance. Using various close and open-ended visual question answering, the dataset provides dense annotations of various semantic, spatial, temporal, and relational attributes of various important objects in complex traffic scenarios. The dense annotations and unique attributes of the dataset make it a valuable resource for researchers working on visual scene understanding and related fields. Further, we introduce a joint model for joint importance level ranking and natural language captions generation to benchmark our dataset and demonstrate performance with quantitative evaluations.
Vision-based Autonomous Disinfection of High Touch Surfaces in Indoor Environments
Aug 25, 2021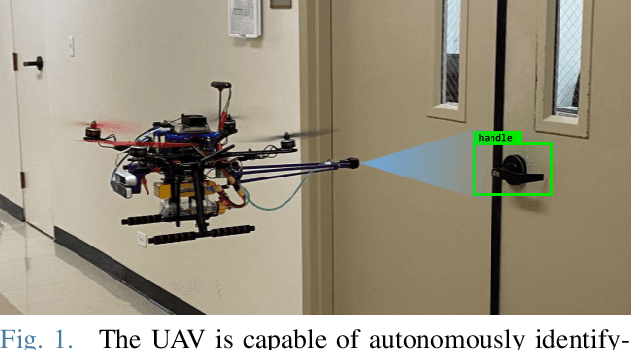
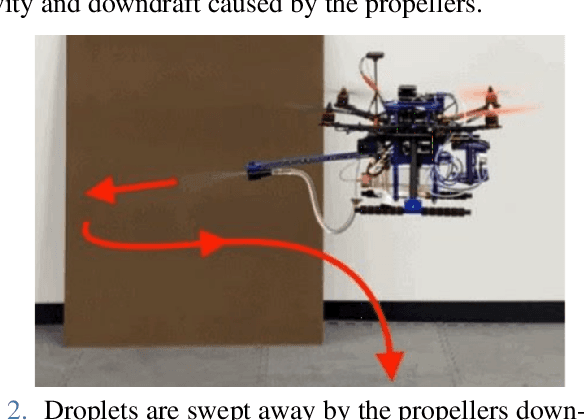
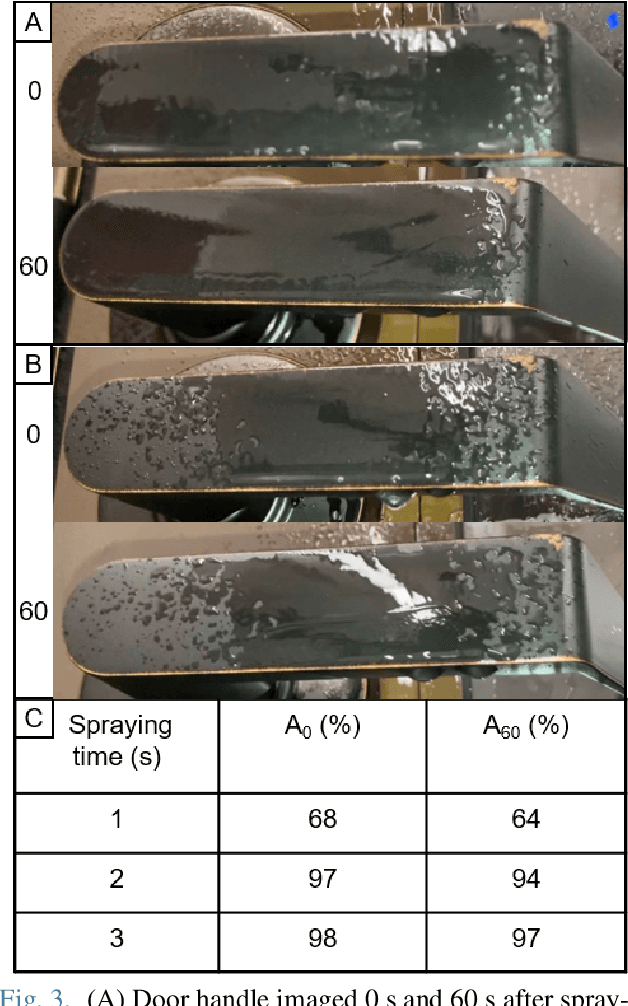
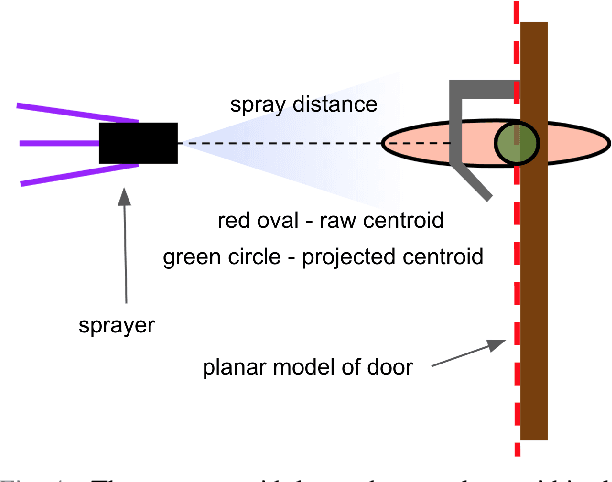
Autonomous systems have played an important role in response to the Covid-19 pandemic. Notably, there have been multiple attempts to leverage Unmanned Aerial Vehicles (UAVs) to disinfect surfaces. Although recent research suggests that surface transmission has a minimal impact in the spread of Covid-19, surfaces do play a significant role in the transmission of many other viruses. Employing UAVs for mass spray disinfection offers several potential advantages including high throughput application of disinfectant, large scale deployment, and the minimization of health risks to sanitation workers. Despite these potential benefits and preliminary usage of UAVs for disinfection, there has been little research into their design and effectiveness. In this work we present an autonomous UAV capable of effectively disinfecting surfaces. We identify relevant parameters such as disinfectant concentration, amount, and application distance required of the UAV to sterilize high touch surfaces such as door handles. Finally, we develop a robotic system that enables the fully autonomous disinfection of door handles in an unstructured, previously unknown environment. To our knowledge, this is the smallest untethered UAV ever built with both full autonomy and spraying capabilities, allowing it to operate in confined indoor settings, and the first autonomous UAV to specifically target high touch surfaces on an individual basis with spray disinfectant, resulting in more efficient use of disinfectant.