 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Codebook Design for FD-MIMO Systems with Multi-Panel Array
Aug 09, 2022
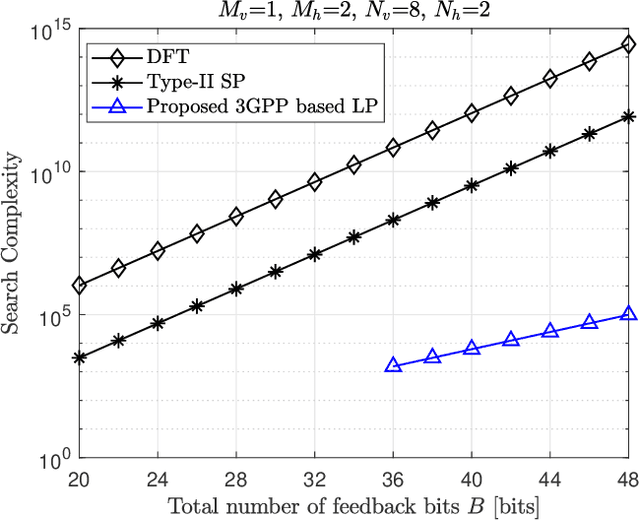


In this work, we study codebook designs for full-dimension multiple-input multiple-output (FD-MIMO) systems with a multi-panel array (MPA). We propose novel codebooks which allow precise beam structures for MPA FD-MIMO systems by investigating the physical properties and alignments of the panels. We specifically exploit the characteristic that a group of antennas in a vertical direction exhibit more correlation than those in a horizontal direction. This enables an economical use of feedback bits while constructing finer beams compared to conventional codebooks. The codebook is further improved by dynamically allocating the feedback bits on multiple parts such as beam amplitude and co-phasing coefficients using reinforcement learning. The numerical results confirm the effectiveness of the proposed approach in terms of both performance and computational complexity.
CKConv: Learning Feature Voxelization for Point Cloud Analysis
Jul 27, 2021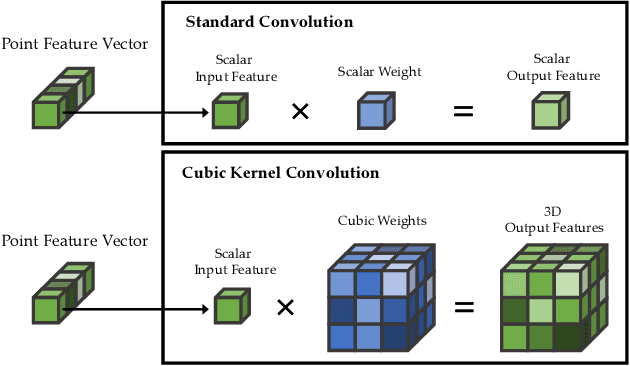
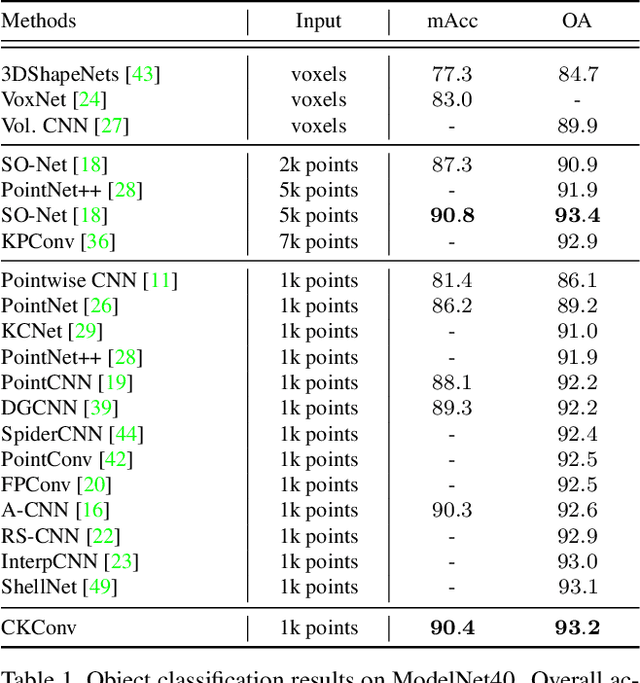
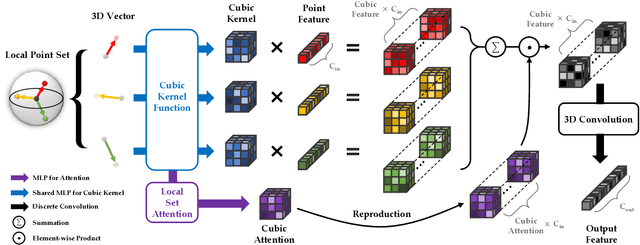

Despite the remarkable success of deep learning, optimal convolution operation on point cloud remains indefinite due to its irregular data structure. In this paper, we present Cubic Kernel Convolution (CKConv) that learns to voxelize the features of local points by exploiting both continuous and discrete convolutions. Our continuous convolution uniquely employs a 3D cubic form of kernel weight representation that splits a feature into voxels in embedding space. By consecutively applying discrete 3D convolutions on the voxelized features in a spatial manner, preceding continuous convolution is forced to learn spatial feature mapping, i.e., feature voxelization. In this way, geometric information can be detailed by encoding with subdivided features, and our 3D convolutions on these fixed structured data do not suffer from discretization artifacts thanks to voxelization in embedding space. Furthermore, we propose a spatial attention module, Local Set Attention (LSA), to provide comprehensive structure awareness within the local point set and hence produce representative features. By learning feature voxelization with LSA, CKConv can extract enriched features for effective point cloud analysis. We show that CKConv has great applicability to point cloud processing tasks including object classification, object part segmentation, and scene semantic segmentation with state-of-the-art results.
EdgeConv with Attention Module for Monocular Depth Estimation
Jun 16, 2021

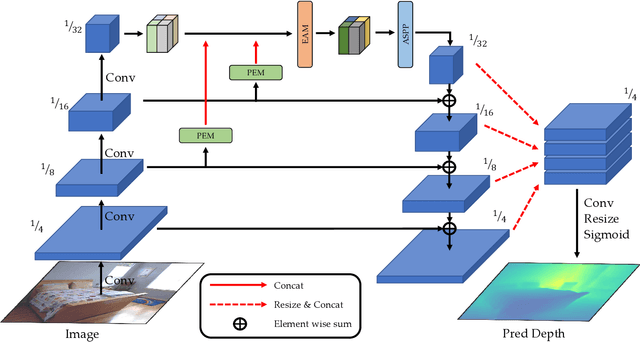

Monocular depth estimation is an especially important task in robotics and autonomous driving, where 3D structural information is essential. However, extreme lighting conditions and complex surface objects make it difficult to predict depth in a single image. Therefore, to generate accurate depth maps, it is important for the model to learn structural information about the scene. We propose a novel Patch-Wise EdgeConv Module (PEM) and EdgeConv Attention Module (EAM) to solve the difficulty of monocular depth estimation. The proposed modules extract structural information by learning the relationship between image patches close to each other in space using edge convolution. Our method is evaluated on two popular datasets, the NYU Depth V2 and the KITTI Eigen split, achieving state-of-the-art performance. We prove that the proposed model predicts depth robustly in challenging scenes through various comparative experiments.
Robust Lane Detection via Expanded Self Attention
Feb 14, 2021

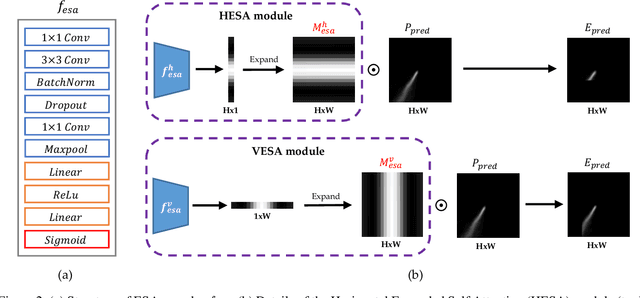

The image-based lane detection algorithm is one of the key technologies in autonomous vehicles. Modern deep learning methods achieve high performance in lane detection, but it is still difficult to accurately detect lanes in challenging situations such as congested roads and extreme lighting conditions. To be robust on these challenging situations, it is important to extract global contextual information even from limited visual cues. In this paper, we propose a simple but powerful self-attention mechanism optimized for lane detection called the Expanded Self Attention (ESA) module. Inspired by the simple geometric structure of lanes, the proposed method predicts the confidence of a lane along the vertical and horizontal directions in an image. The prediction of the confidence enables estimating occluded locations by extracting global contextual information. ESA module can be easily implemented and applied to any encoder-decoder-based model without increasing the inference time. The performance of our method is evaluated on three popular lane detection benchmarks (TuSimple, CULane and BDD100K). We achieve state-of-the-art performance in CULane and BDD100K and distinct improvement on TuSimple dataset. The experimental results show that our approach is robust to occlusion and extreme lighting conditions.
False Positive Removal for 3D Vehicle Detection with Penetrated Point Classifier
May 28, 2020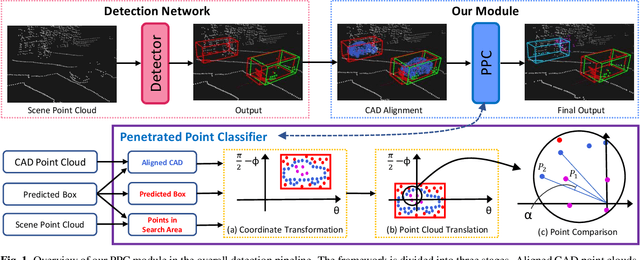

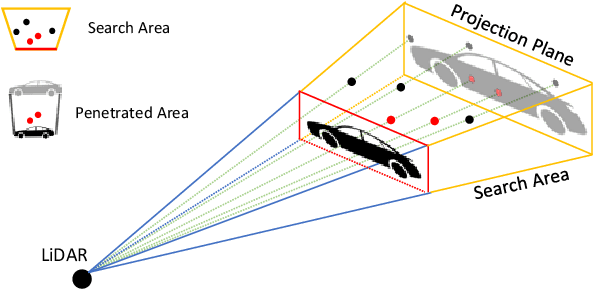
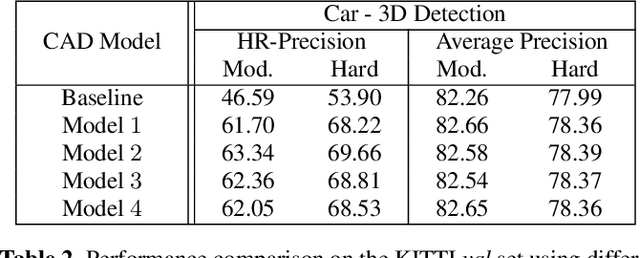
Recently, researchers have been leveraging LiDAR point cloud for higher accuracy in 3D vehicle detection. Most state-of-the-art methods are deep learning based, but are easily affected by the number of points generated on the object. This vulnerability leads to numerous false positive boxes at high recall positions, where objects are occasionally predicted with few points. To address the issue, we introduce Penetrated Point Classifier (PPC) based on the underlying property of LiDAR that points cannot be generated behind vehicles. It determines whether a point exists behind the vehicle of the predicted box, and if does, the box is distinguished as false positive. Our straightforward yet unprecedented approach is evaluated on KITTI dataset and achieved performance improvement of PointRCNN, one of the state-of-the-art methods. The experiment results show that precision at the highest recall position is dramatically increased by 15.46 percentage points and 14.63 percentage points on the moderate and hard difficulty of car class, respectively.
AD-VO: Scale-Resilient Visual Odometry Using Attentive Disparity Map
Jan 07, 2020

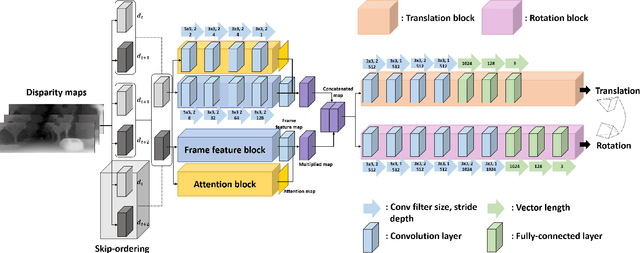
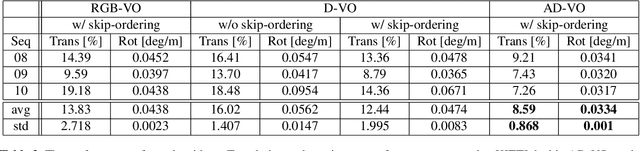
Visual odometry is an essential key for a localization module in SLAM systems. However, previous methods require tuning the system to adapt environment changes. In this paper, we propose a learning-based approach for frame-to-frame monocular visual odometry estimation. The proposed network is only learned by disparity maps for not only covering the environment changes but also solving the scale problem. Furthermore, attention block and skip-ordering scheme are introduced to achieve robust performance in various driving environment. Our network is compared with the conventional methods which use common domain such as color or optical flow. Experimental results confirm that the proposed network shows better performance than other approaches with higher and more stable results.
Deep Learning-based Limited Feedback Designs for MIMO Systems
Dec 19, 2019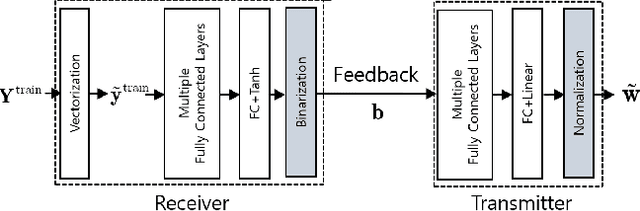
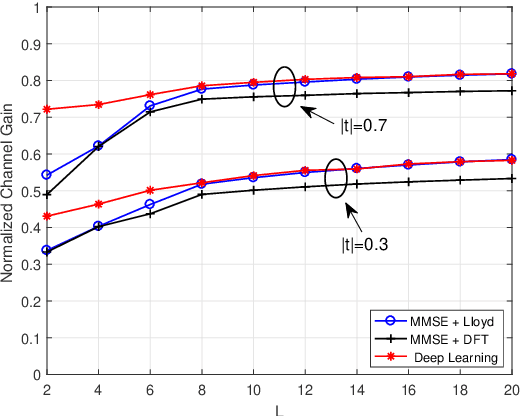


We study a deep learning (DL) based limited feedback methods for multi-antenna systems. Deep neural networks (DNNs) are introduced to replace an end-to-end limited feedback procedure including pilot-aided channel training process, channel codebook design, and beamforming vector selection. The DNNs are trained to yield binary feedback information as well as an efficient beamforming vector which maximizes the effective channel gain. Compared to conventional limited feedback schemes, the proposed DL method shows an 1 dB symbol error rate (SER) gain with reduced computational complexity.