 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMU-based online multi-lidar calibration without lidar odometry
Feb 28, 2023When deploying autonomous systems that require several sensors for perception, accurate and reliable extrinsic calibration is required. In this research, we offer a reliable technique that can extrinsically calibrate numerous lidars in the base frame of a moving vehicle without the use of odometry estimation or fiducial markers. Our method is based on comparing the raw IMU signals between a collocated IMU present with the lidar and the IMU measurements from the GNSS system in the vehicle base frame. Additionally, based on our observability criterion, we choose measurements that include the most mutual information rather than comparing all comparable IMU readings. This enables us to locate the measurements that are most useful for real-time calibration. Utilizing data gathered from Scania test vehicles with various sensor setups, we have successfully validated our methodology.
Observability-aware online multi-lidar extrinsic calibration
Dec 19, 2022Accurate and robust extrinsic calibration is necessary for deploying autonomous systems which need multiple sensors for perception. In this paper, we present a robust system for real-time extrinsic calibration of multiple lidars in vehicle base frame without the need for any fiducial markers or features. We base our approach on matching absolute GNSS and estimated lidar poses in real-time. Comparing rotation components allows us to improve the robustness of the solution than traditional least-square approach comparing translation components only. Additionally, instead of comparing all corresponding poses, we select poses comprising maximum mutual information based on our novel observability criteria. This allows us to identify a subset of the poses helpful for real-time calibration. We also provide stopping criteria for ensuring calibration completion. To validate our approach extensive tests were carried out on data collected using Scania test vehicles (7 sequences for a total of ~ 6.5 Km). The results presented in this paper show that our approach is able to accurately determine the extrinsic calibration for various combinations of sensor setups.
M-LIO: Multi-lidar, multi-IMU odometry with sensor dropout tolerance
Oct 09, 2022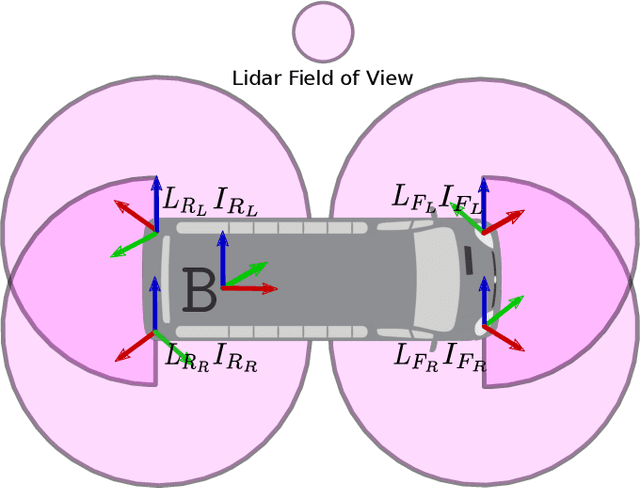


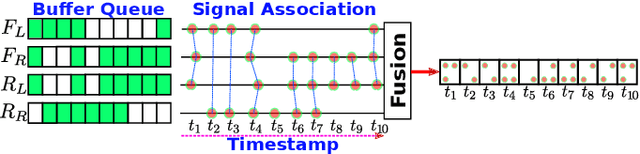
We present a robust system for state estimation that fuses measurements from multiple lidars and inertial sensors with GNSS data. To initiate the method, we use the prior GNSS pose information. We then perform incremental motion in real-time, which produces robust motion estimates in a global frame by fusing lidar and IMU signals with GNSS translation components using a factor graph framework. We also propose methods to account for signal loss with a novel synchronization and fusion mechanism. To validate our approach extensive tests were carried out on data collected using Scania test vehicles (5 sequences for a total of ~ 7 Km). From our evaluations, we show an average improvement of 61% in relative translation and 42% rotational error compared to a state-of-the-art estimator fusing a single lidar/inertial sensor pair.
Neural Greedy Pursuit for Feature Selection
Jul 19, 2022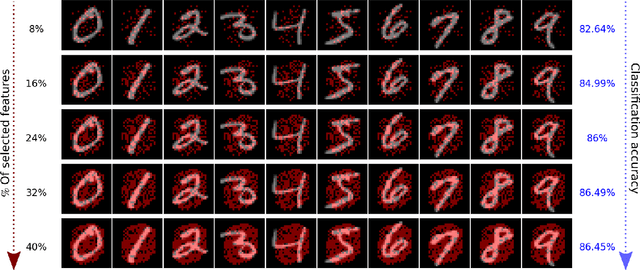
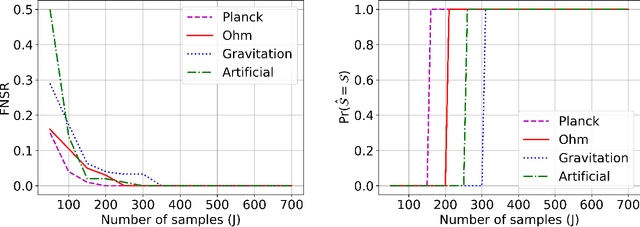
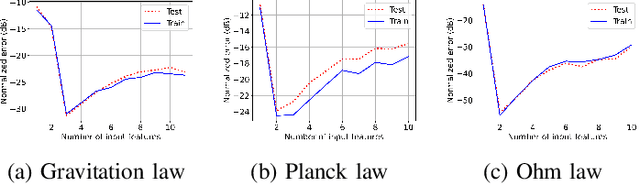
We propose a greedy algorithm to select $N$ important features among $P$ input features for a non-linear prediction problem. The features are selected one by one sequentially, in an iterative loss minimization procedure. We use neural networks as predictors in the algorithm to compute the loss and hence, we refer to our method as neural greedy pursuit (NGP). NGP is efficient in selecting $N$ features when $N \ll P$, and it provides a notion of feature importance in a descending order following the sequential selection procedure. We experimentally show that NGP provides better performance than several feature selection methods such as DeepLIFT and Drop-one-out loss. In addition, we experimentally show a phase transition behavior in which perfect selection of all $N$ features without false positives is possible when the training data size exceeds a threshold.
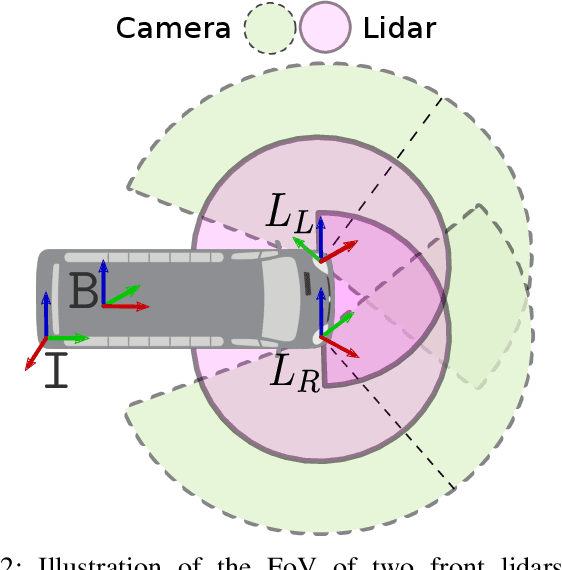
Extrinsic Calibration and Verification of Multiple Non-overlapping Field of View Lidar Sensors
May 14, 2022



We demonstrate a multi-lidar calibration framework for large mobile platforms that jointly calibrate the extrinsic parameters of non-overlapping Field-of-View (FoV) lidar sensors, without the need for any external calibration aid. The method starts by estimating the pose of each lidar in its corresponding sensor frame in between subsequent timestamps. Since the pose estimates from the lidars are not necessarily synchronous, we first align the poses using a Dual Quaternion (DQ) based Screw Linear Interpolation. Afterward, a Hand-Eye based calibration problem is solved using the DQ-based formulation to recover the extrinsics. Furthermore, we verify the extrinsics by matching chosen lidar semantic features, obtained by projecting the lidar data into the camera perspective after time alignment using vehicle kinematics. Experimental results on the data collected from a Scania vehicle [$\sim$ 1 Km sequence] demonstrate the ability of our approach to obtain better calibration parameters than the provided vehicle CAD model calibration parameters. This setup can also be scaled to any combination of multiple lidars.
Multi-modal curb detection and filtering
May 14, 2022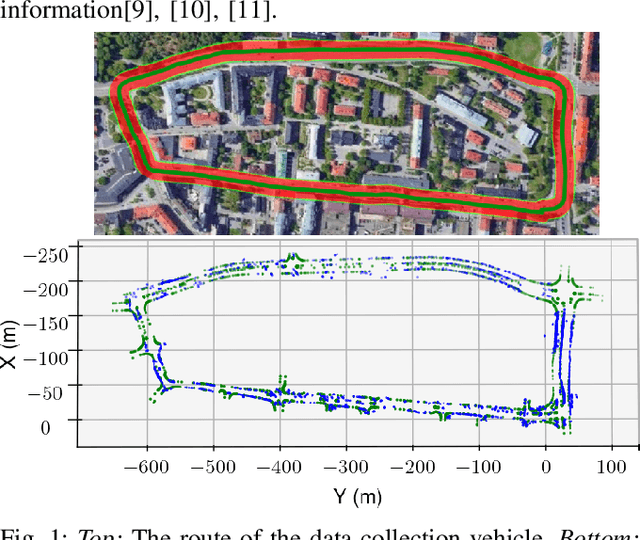


Reliable knowledge of road boundaries is critical for autonomous vehicle navigation. We propose a robust curb detection and filtering technique based on the fusion of camera semantics and dense lidar point clouds. The lidar point clouds are collected by fusing multiple lidars for robust feature detection. The camera semantics are based on a modified EfficientNet architecture which is trained with labeled data collected from onboard fisheye cameras. The point clouds are associated with the closest curb segment with $L_2$-norm analysis after projecting into the image space with the fisheye model projection. Next, the selected points are clustered using unsupervised density-based spatial clustering to detect different curb regions. As new curb points are detected in consecutive frames they are associated with the existing curb clusters using temporal reachability constraints. If no reachability constraints are found a new curb cluster is formed from these new points. This ensures we can detect multiple curbs present in road segments consisting of multiple lanes if they are in the sensors' field of view. Finally, Delaunay filtering is applied for outlier removal and its performance is compared to traditional RANSAC-based filtering. An objective evaluation of the proposed solution is done using a high-definition map containing ground truth curb points obtained from a commercial map supplier. The proposed system has proven capable of detecting curbs of any orientation in complex urban road scenarios comprising straight roads, curved roads, and intersections with traffic isles.
Statistical model-based evaluation of neural networks
Nov 18, 2020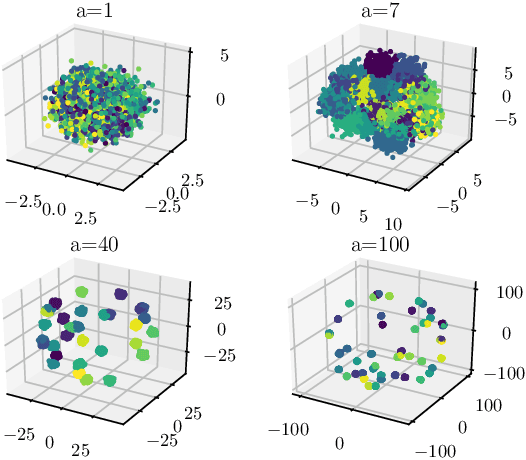
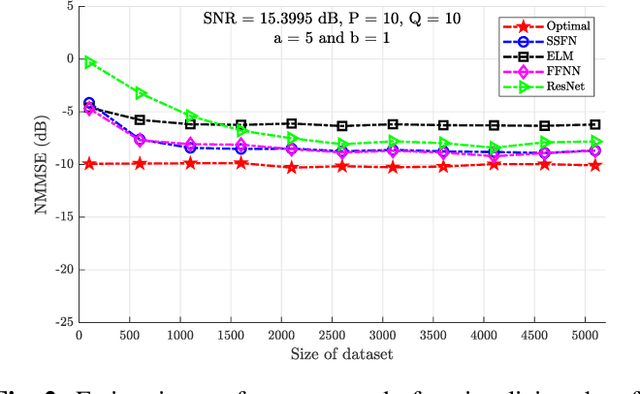
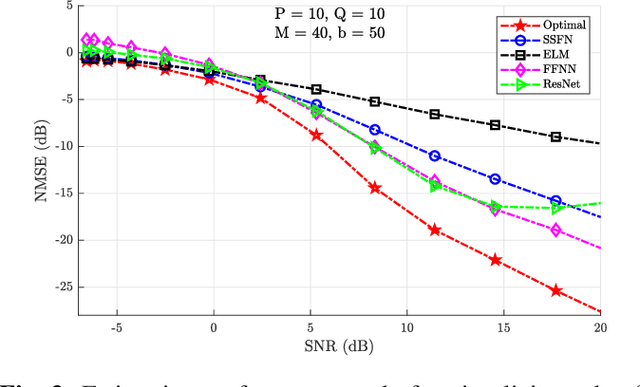
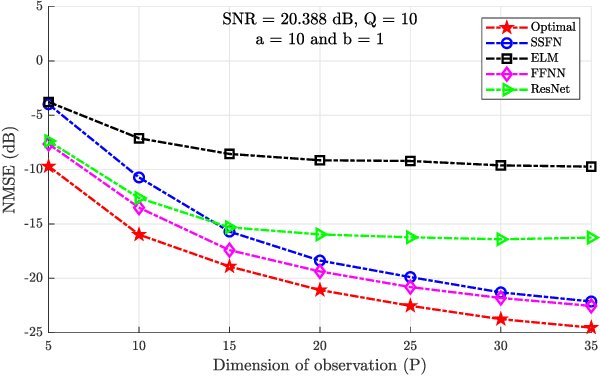
Using a statistical model-based data generation, we develop an experimental setup for the evaluation of neural networks (NNs). The setup helps to benchmark a set of NNs vis-a-vis minimum-mean-square-error (MMSE) performance bounds. This allows us to test the effects of training data size, data dimension, data geometry, noise, and mismatch between training and testing conditions. In the proposed setup, we use a Gaussian mixture distribution to generate data for training and testing a set of competing NNs. Our experiments show the importance of understanding the type and statistical conditions of data for appropriate application and design of NNs
Unified Multi-Modal Landmark Tracking for Tightly Coupled Lidar-Visual-Inertial Odometry
Nov 13, 2020
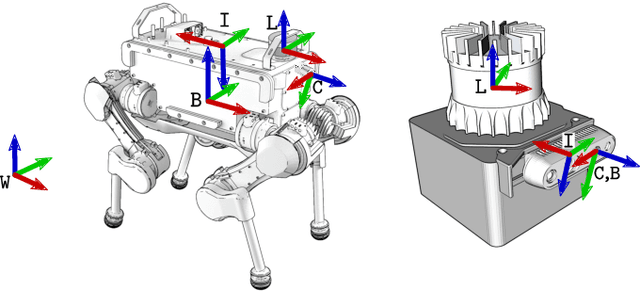
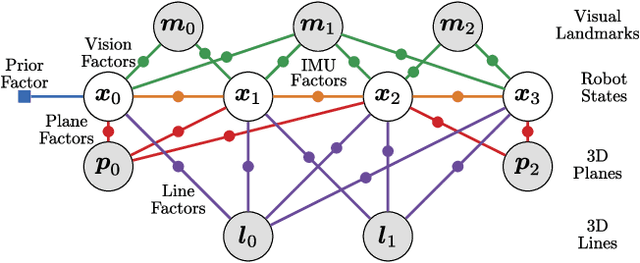
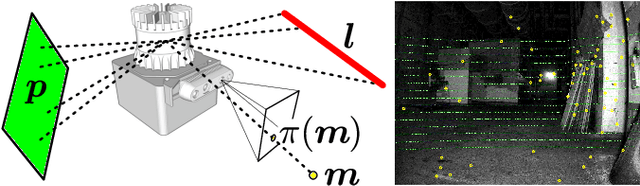
We present an efficient multi-sensor odometry system for mobile platforms that jointly optimizes visual, lidar, and inertial information within a single integrated factor graph. This runs in real-time at full framerate using fixed lag smoothing. To perform such tight integration, a new method to extract 3D line and planar primitives from lidar point clouds is presented. This approach overcomes the suboptimality of typical frame-to-frame tracking methods by treating the primitives as landmarks and tracking them over multiple scans. True integration of lidar features with standard visual features and IMU is made possible using a subtle passive synchronization of lidar and camera frames. The lightweight formulation of the 3D features allows for real-time execution on a single CPU. Our proposed system has been tested on a variety of platforms and scenarios, including underground exploration with a legged robot and outdoor scanning with a dynamically moving handheld device, for a total duration of 96 min and 2.4 km traveled distance. In these test sequences, using only one exteroceptive sensor leads to failure due to either underconstrained geometry (affecting lidar) and textureless areas caused by aggressive lighting changes (affecting vision). In these conditions, our factor graph naturally uses the best information available from each sensor modality without any hard switches.
A ReLU Dense Layer to Improve the Performance of Neural Networks
Oct 22, 2020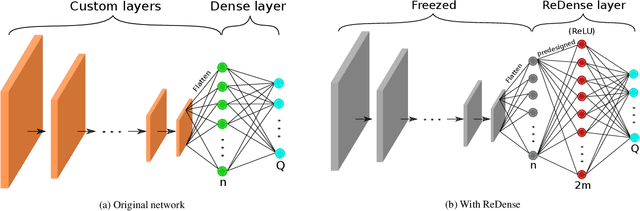
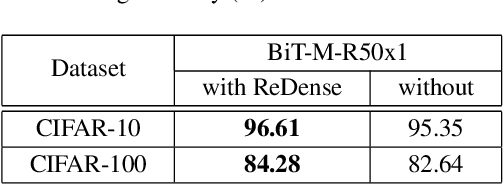
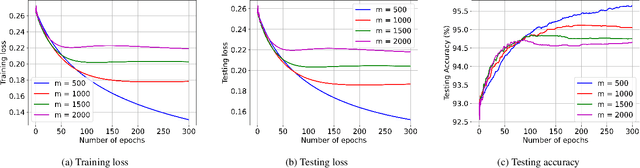
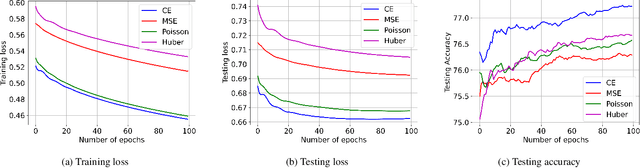
We propose ReDense as a simple and low complexity way to improve the performance of trained neural networks. We use a combination of random weights and rectified linear unit (ReLU) activation function to add a ReLU dense (ReDense) layer to the trained neural network such that it can achieve a lower training loss. The lossless flow property (LFP) of ReLU is the key to achieve the lower training loss while keeping the generalization error small. ReDense does not suffer from vanishing gradient problem in the training due to having a shallow structure. We experimentally show that ReDense can improve the training and testing performance of various neural network architectures with different optimization loss and activation functions. Finally, we test ReDense on some of the state-of-the-art architectures and show the performance improvement on benchmark datasets.