 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM-LIO: Multi-lidar, multi-IMU odometry with sensor dropout tolerance
Oct 09, 2022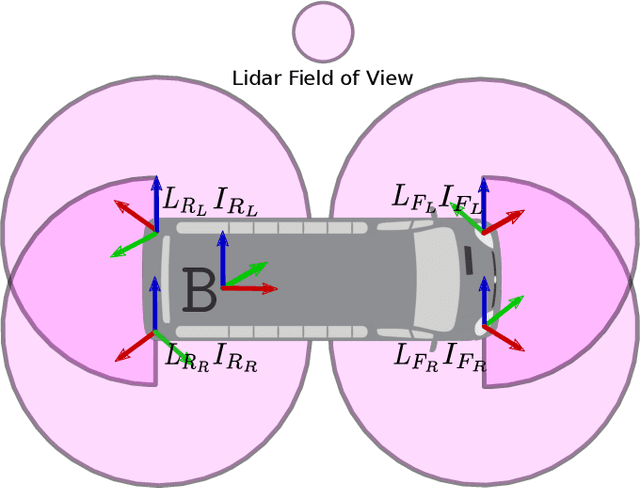


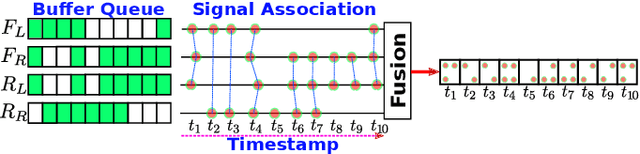
We present a robust system for state estimation that fuses measurements from multiple lidars and inertial sensors with GNSS data. To initiate the method, we use the prior GNSS pose information. We then perform incremental motion in real-time, which produces robust motion estimates in a global frame by fusing lidar and IMU signals with GNSS translation components using a factor graph framework. We also propose methods to account for signal loss with a novel synchronization and fusion mechanism. To validate our approach extensive tests were carried out on data collected using Scania test vehicles (5 sequences for a total of ~ 7 Km). From our evaluations, we show an average improvement of 61% in relative translation and 42% rotational error compared to a state-of-the-art estimator fusing a single lidar/inertial sensor pair.
Extrinsic Calibration and Verification of Multiple Non-overlapping Field of View Lidar Sensors
May 14, 2022



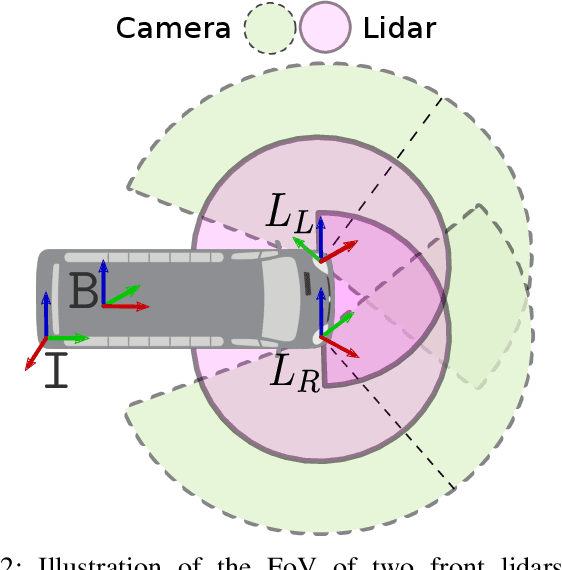
We demonstrate a multi-lidar calibration framework for large mobile platforms that jointly calibrate the extrinsic parameters of non-overlapping Field-of-View (FoV) lidar sensors, without the need for any external calibration aid. The method starts by estimating the pose of each lidar in its corresponding sensor frame in between subsequent timestamps. Since the pose estimates from the lidars are not necessarily synchronous, we first align the poses using a Dual Quaternion (DQ) based Screw Linear Interpolation. Afterward, a Hand-Eye based calibration problem is solved using the DQ-based formulation to recover the extrinsics. Furthermore, we verify the extrinsics by matching chosen lidar semantic features, obtained by projecting the lidar data into the camera perspective after time alignment using vehicle kinematics. Experimental results on the data collected from a Scania vehicle [$\sim$ 1 Km sequence] demonstrate the ability of our approach to obtain better calibration parameters than the provided vehicle CAD model calibration parameters. This setup can also be scaled to any combination of multiple lidars.
Multi-modal curb detection and filtering
May 14, 2022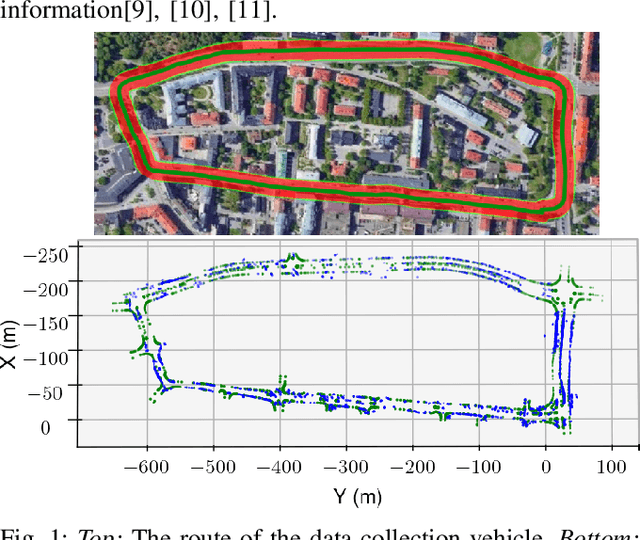


Reliable knowledge of road boundaries is critical for autonomous vehicle navigation. We propose a robust curb detection and filtering technique based on the fusion of camera semantics and dense lidar point clouds. The lidar point clouds are collected by fusing multiple lidars for robust feature detection. The camera semantics are based on a modified EfficientNet architecture which is trained with labeled data collected from onboard fisheye cameras. The point clouds are associated with the closest curb segment with $L_2$-norm analysis after projecting into the image space with the fisheye model projection. Next, the selected points are clustered using unsupervised density-based spatial clustering to detect different curb regions. As new curb points are detected in consecutive frames they are associated with the existing curb clusters using temporal reachability constraints. If no reachability constraints are found a new curb cluster is formed from these new points. This ensures we can detect multiple curbs present in road segments consisting of multiple lanes if they are in the sensors' field of view. Finally, Delaunay filtering is applied for outlier removal and its performance is compared to traditional RANSAC-based filtering. An objective evaluation of the proposed solution is done using a high-definition map containing ground truth curb points obtained from a commercial map supplier. The proposed system has proven capable of detecting curbs of any orientation in complex urban road scenarios comprising straight roads, curved roads, and intersections with traffic isles.