 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferentiable Rendering of Neural SDFs through Reparameterization
Jun 10, 2022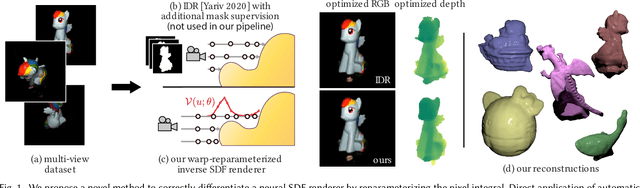

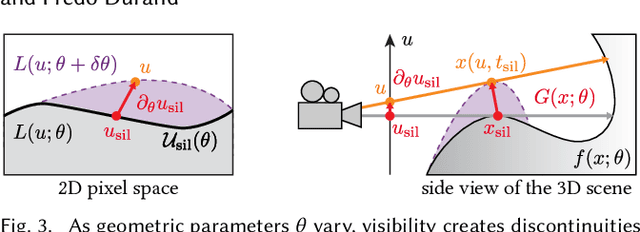
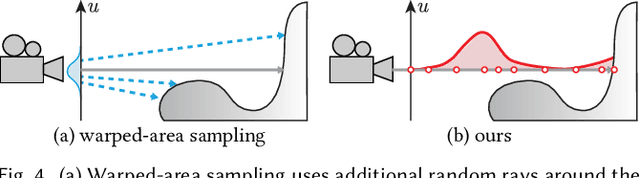
We present a method to automatically compute correct gradients with respect to geometric scene parameters in neural SDF renderers. Recent physically-based differentiable rendering techniques for meshes have used edge-sampling to handle discontinuities, particularly at object silhouettes, but SDFs do not have a simple parametric form amenable to sampling. Instead, our approach builds on area-sampling techniques and develops a continuous warping function for SDFs to account for these discontinuities. Our method leverages the distance to surface encoded in an SDF and uses quadrature on sphere tracer points to compute this warping function. We further show that this can be done by subsampling the points to make the method tractable for neural SDFs. Our differentiable renderer can be used to optimize neural shapes from multi-view images and produces comparable 3D reconstructions to recent SDF-based inverse rendering methods, without the need for 2D segmentation masks to guide the geometry optimization and no volumetric approximations to the geometry.
Exploration for Multi-task Reinforcement Learning with Deep Generative Models
Nov 29, 2016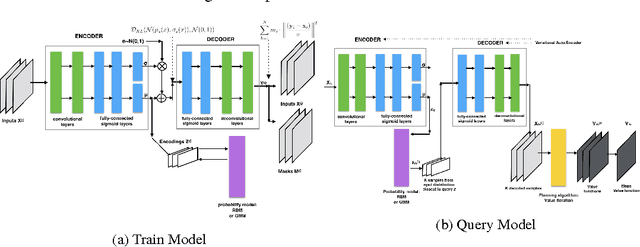


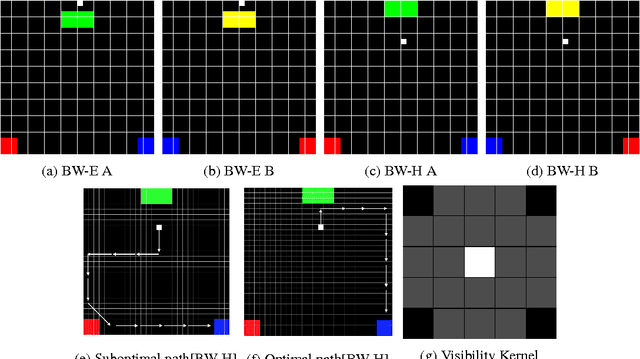
Exploration in multi-task reinforcement learning is critical in training agents to deduce the underlying MDP. Many of the existing exploration frameworks such as $E^3$, $R_{max}$, Thompson sampling assume a single stationary MDP and are not suitable for system identification in the multi-task setting. We present a novel method to facilitate exploration in multi-task reinforcement learning using deep generative models. We supplement our method with a low dimensional energy model to learn the underlying MDP distribution and provide a resilient and adaptive exploration signal to the agent. We evaluate our method on a new set of environments and provide intuitive interpretation of our results.