Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploration for Multi-task Reinforcement Learning with Deep Generative Models
Paper and Code
Nov 29, 2016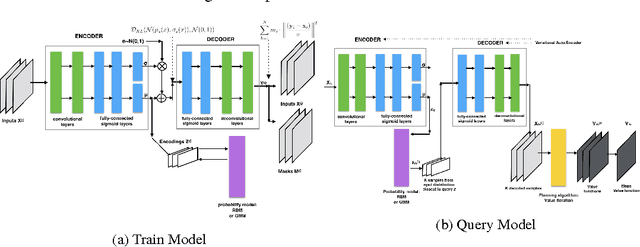


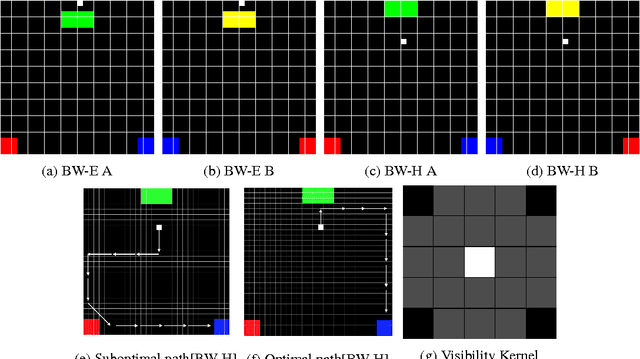
Exploration in multi-task reinforcement learning is critical in training agents to deduce the underlying MDP. Many of the existing exploration frameworks such as $E^3$, $R_{max}$, Thompson sampling assume a single stationary MDP and are not suitable for system identification in the multi-task setting. We present a novel method to facilitate exploration in multi-task reinforcement learning using deep generative models. We supplement our method with a low dimensional energy model to learn the underlying MDP distribution and provide a resilient and adaptive exploration signal to the agent. We evaluate our method on a new set of environments and provide intuitive interpretation of our results.
* 9 pages, 5 figures; NIPS Deep Reinforcement Learning Workshop 2016,
Barcelona
View paper on