 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePCFootprint: A Large-Scale Dataset and Benchmark for Vectorized Building Footprint Extraction from Aerial LiDAR Point Clouds
Jun 18, 2026Building footprint extraction is a fundamental task in photogrammetry, remote sensing, and computer vision. Recent image-based methods have achieved remarkable progress in extracting vectorized footprints from high-resolution optical imagery. However, optical imagery inherently susceptible to occlusions, perspective distortions, and residual relief displacement, yielding incomplete or misaligned footprint extraction. Furthermore, the lack of explicit elevation information limits its direct applicability to Level of Detail building modeling. In this paper, we present PCFootprint, the first large-scale public dataset for footprint extraction from airborne laser scanning point clouds. PCFootprint comprises \num{33000} tiles derived from the Estonian Land and Spatial Development Board, covering diverse urban and rural landscapes. Each tile spans \qtyproduct{128 x 128}{\m} with systematically aligned vectorized footprints aligned to point clouds. The dataset includes a \num{3000} tiles cross-domain test set for evaluating generalization across geographic regions. We establish comprehensive benchmarks by evaluating mainstream methods. Experimental results reveal significant challenges including high intra-class variance, data imbalance, and noise across complex geospatial environments. We believe PCFootprint will advance future research in building modeling, urban scene understanding, and geospatial analysis. The PCFootprint dataset is publicly available at \url{https://huggingface.co/datasets/Haoyuan-Shen/PCFootprint}.
Region Matters: Efficient and Reliable Region-Aware Visual Place Recognition
Apr 24, 2026Visual Place Recognition (VPR) determines a query image's geographic location by matching it against geotagged databases. However, existing methods struggle with perceptual aliasing caused by irrelevant regions and inefficient re-ranking due to rigid candidate scheduling. To address these issues, we introduce FoL++, a method combining robust discriminative region modeling with adaptive re-ranking. Specifically, we propose a Reliability Estimation Branch to generate spatial reliability maps that explicitly model occlusion resistance. This representation is further optimized by two spatial alignment losses (SAL and SCEL) to effectively align features and highlight salient regions. For weakly supervised learning without manual annotations, a pseudo-correspondence strategy generates dense local feature supervision directly from aggregation clusters. Our Adaptive Candidate Scheduler dynamically resizes candidate pools based on global similarity. By weighting local matches by reliability and adaptively fusing global and local evidence, FoL++ surpasses traditional independent matching systems. Extensive experiments across seven benchmarks demonstrate that FoL++ achieves state-of-the-art performance with a lightweight memory footprint, improving inference speed by 40% over FoL. Code and models will be released (and merged with FoL) at https://github.com/chenshunpeng/FoL.
LeafInst - Unified Instance Segmentation Network for Fine-Grained Forestry Leaf Phenotype Analysis: A New UAV based Benchmark
Mar 04, 2026Intelligent forest tree breeding has advanced plant phenotyping, yet existing research largely focuses on large-leaf agricultural crops, with limited attention to fine-grained leaf analysis of sapling trees in open-field environments. Natural scenes introduce challenges including scale variation, illumination changes, and irregular leaf morphology. To address these issues, we collected UAV RGB imagery of field-grown saplings and constructed the Poplar-leaf dataset, containing 1,202 branches and 19,876 pixel-level annotated leaf instances. To our knowledge, this is the first instance segmentation dataset specifically designed for forestry leaves in open-field conditions. We propose LeafInst, a novel segmentation framework tailored for irregular and multi-scale leaf structures. The model integrates an Asymptotic Feature Pyramid Network (AFPN) for multi-scale perception, a Dynamic Asymmetric Spatial Perception (DASP) module for irregular shape modeling, and a dual-residual Dynamic Anomalous Regression Head (DARH) with Top-down Concatenation decoder Feature Fusion (TCFU) to improve detection and segmentation performance. On Poplar-leaf, LeafInst achieves 68.4 mAP, outperforming YOLOv11 by 7.1 percent and MaskDINO by 6.5 percent. On the public PhenoBench benchmark, it reaches 52.7 box mAP, exceeding MaskDINO by 3.4 percent. Additional experiments demonstrate strong generalization and practical utility for large-scale leaf phenotyping.
BuildingWorld: A Structured 3D Building Dataset for Urban Foundation Models
Nov 09, 2025As digital twins become central to the transformation of modern cities, accurate and structured 3D building models emerge as a key enabler of high-fidelity, updatable urban representations. These models underpin diverse applications including energy modeling, urban planning, autonomous navigation, and real-time reasoning. Despite recent advances in 3D urban modeling, most learning-based models are trained on building datasets with limited architectural diversity, which significantly undermines their generalizability across heterogeneous urban environments. To address this limitation, we present BuildingWorld, a comprehensive and structured 3D building dataset designed to bridge the gap in stylistic diversity. It encompasses buildings from geographically and architecturally diverse regions -- including North America, Europe, Asia, Africa, and Oceania -- offering a globally representative dataset for urban-scale foundation modeling and analysis. Specifically, BuildingWorld provides about five million LOD2 building models collected from diverse sources, accompanied by real and simulated airborne LiDAR point clouds. This enables comprehensive research on 3D building reconstruction, detection and segmentation. Cyber City, a virtual city model, is introduced to enable the generation of unlimited training data with customized and structurally diverse point cloud distributions. Furthermore, we provide standardized evaluation metrics tailored for building reconstruction, aiming to facilitate the training, evaluation, and comparison of large-scale vision models and foundation models in structured 3D urban environments.
APC2Mesh: Bridging the gap from occluded building façades to full 3D models
Apr 03, 2024The benefits of having digital twins of urban buildings are numerous. However, a major difficulty encountered in their creation from airborne LiDAR point clouds is the effective means of accurately reconstructing significant occlusions amidst point density variations and noise. To bridge the noise/sparsity/occlusion gap and generate high fidelity 3D building models, we propose APC2Mesh which integrates point completion into a 3D reconstruction pipeline, enabling the learning of dense geometrically accurate representation of buildings. Specifically, we leveraged complete points generated from occluded ones as input to a linearized skip attention-based deformation network for 3D mesh reconstruction. In our experiments, conducted on 3 different scenes, we demonstrate that: (1) APC2Mesh delivers comparatively superior results, indicating its efficacy in handling the challenges of occluded airborne building points of diverse styles and complexities. (2) The combination of point completion with typical deep learning-based 3D point cloud reconstruction methods offers a direct and effective solution for reconstructing significantly occluded airborne building points. As such, this neural integration holds promise for advancing the creation of digital twins for urban buildings with greater accuracy and fidelity.
PBWR: Parametric Building Wireframe Reconstruction from Aerial LiDAR Point Clouds
Nov 18, 2023


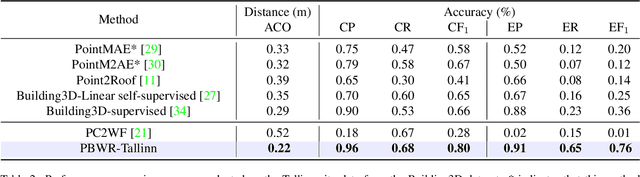
In this paper, we present an end-to-end 3D building wireframe reconstruction method to regress edges directly from aerial LiDAR point clouds.Our method, named Parametric Building Wireframe Reconstruction (PBWR), takes aerial LiDAR point clouds and initial edge entities as input, and fully uses self-attention mechanism of transformers to regress edge parameters without any intermediate steps such as corner prediction. We propose an edge non-maximum suppression (E-NMS) module based on edge similarityto remove redundant edges. Additionally, a dedicated edge loss function is utilized to guide the PBWR in regressing edges parameters, where simple use of edge distance loss isn't suitable. In our experiments, we demonstrate state-of-the-art results on the Building3D dataset, achieving an improvement of approximately 36% in entry-level dataset edge accuracy and around 42% improvement in the Tallinn dataset.
A Multimodal Learning Framework for Comprehensive 3D Mineral Prospectivity Modeling with Jointly Learned Structure-Fluid Relationships
Sep 06, 2023
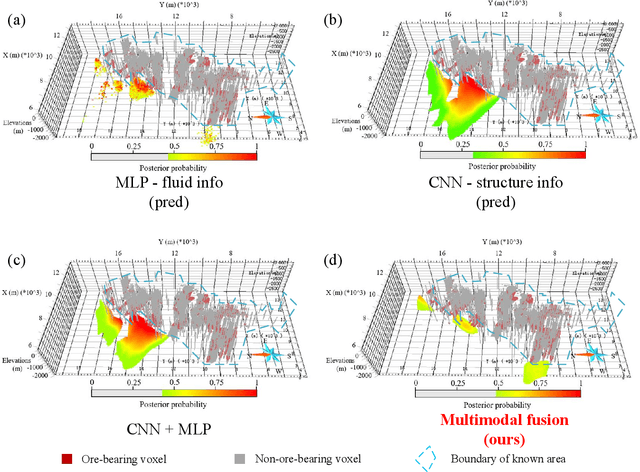

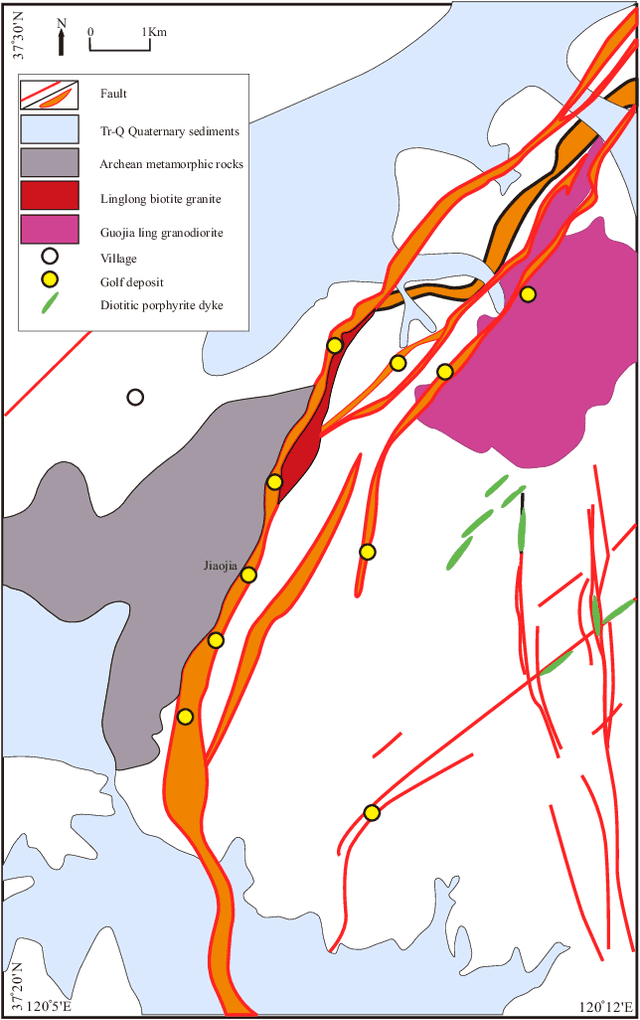
This study presents a novel multimodal fusion model for three-dimensional mineral prospectivity mapping (3D MPM), effectively integrating structural and fluid information through a deep network architecture. Leveraging Convolutional Neural Networks (CNN) and Multilayer Perceptrons (MLP), the model employs canonical correlation analysis (CCA) to align and fuse multimodal features. Rigorous evaluation on the Jiaojia gold deposit dataset demonstrates the model's superior performance in distinguishing ore-bearing instances and predicting mineral prospectivity, outperforming other models in result analyses. Ablation studies further reveal the benefits of joint feature utilization and CCA incorporation. This research not only advances mineral prospectivity modeling but also highlights the pivotal role of data integration and feature alignment for enhanced exploration decision-making.
Building3D: An Urban-Scale Dataset and Benchmarks for Learning Roof Structures from Point Clouds
Jul 21, 2023Urban modeling from LiDAR point clouds is an important topic in computer vision, computer graphics, photogrammetry and remote sensing. 3D city models have found a wide range of applications in smart cities, autonomous navigation, urban planning and mapping etc. However, existing datasets for 3D modeling mainly focus on common objects such as furniture or cars. Lack of building datasets has become a major obstacle for applying deep learning technology to specific domains such as urban modeling. In this paper, we present a urban-scale dataset consisting of more than 160 thousands buildings along with corresponding point clouds, mesh and wire-frame models, covering 16 cities in Estonia about 998 Km2. We extensively evaluate performance of state-of-the-art algorithms including handcrafted and deep feature based methods. Experimental results indicate that Building3D has challenges of high intra-class variance, data imbalance and large-scale noises. The Building3D is the first and largest urban-scale building modeling benchmark, allowing a comparison of supervised and self-supervised learning methods. We believe that our Building3D will facilitate future research on urban modeling, aerial path planning, mesh simplification, and semantic/part segmentation etc.
DRB-GAN: A Dynamic ResBlock Generative Adversarial Network for Artistic Style Transfer
Aug 19, 2021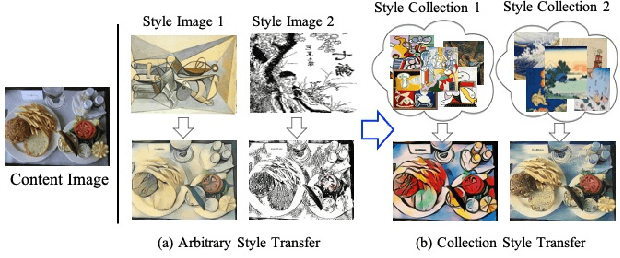
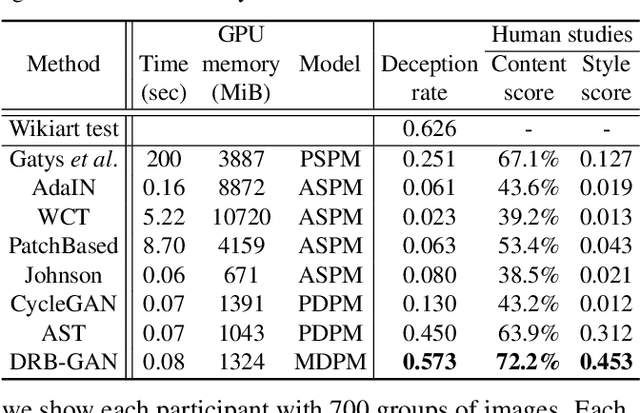
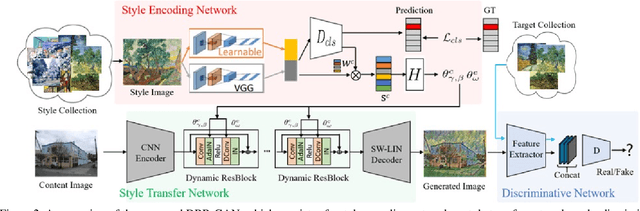
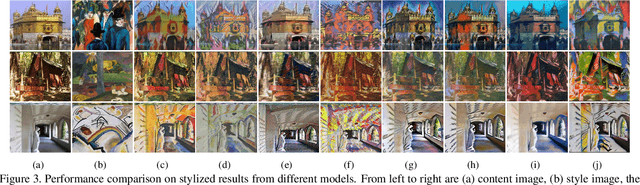
The paper proposes a Dynamic ResBlock Generative Adversarial Network (DRB-GAN) for artistic style transfer. The style code is modeled as the shared parameters for Dynamic ResBlocks connecting both the style encoding network and the style transfer network. In the style encoding network, a style class-aware attention mechanism is used to attend the style feature representation for generating the style codes. In the style transfer network, multiple Dynamic ResBlocks are designed to integrate the style code and the extracted CNN semantic feature and then feed into the spatial window Layer-Instance Normalization (SW-LIN) decoder, which enables high-quality synthetic images with artistic style transfer. Moreover, the style collection conditional discriminator is designed to equip our DRB-GAN model with abilities for both arbitrary style transfer and collection style transfer during the training stage. No matter for arbitrary style transfer or collection style transfer, extensive experiments strongly demonstrate that our proposed DRB-GAN outperforms state-of-the-art methods and exhibits its superior performance in terms of visual quality and efficiency. Our source code is available at \color{magenta}{\url{https://github.com/xuwenju123/DRB-GAN}}.
An optimal hierarchical clustering approach to segmentation of mobile LiDAR point clouds
Nov 09, 2017
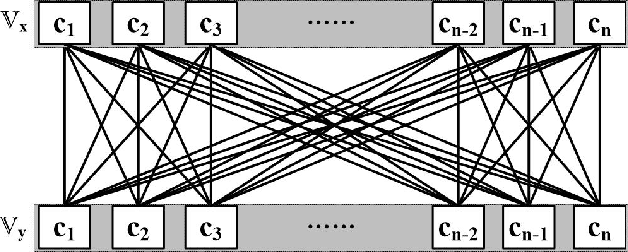


This paper proposes a hierarchical clustering approach for the segmentation of mobile LiDAR point clouds. We perform the hierarchical clustering on unorganized point clouds based on a proximity matrix. The dissimilarity measure in the proximity matrix is calculated by the Euclidean distances between clusters and the difference of normal vectors at given points. The main contribution of this paper is that we succeed to optimize the combination of clusters in the hierarchical clustering. The combination is obtained by achieving the matching of a bipartite graph, and optimized by solving the minimum-cost perfect matching. Results show that the proposed optimal hierarchical clustering (OHC) succeeds to achieve the segmentation of multiple individual objects automatically and outperforms the state-of-the-art LiDAR point cloud segmentation approaches.