 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Cognitive Model for Humanoid Robot Navigation and Mapping using Alderbaran NAO
Paper and Code
Jul 21, 2014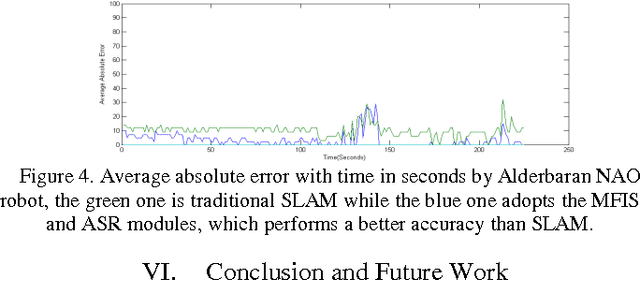
The aim of this work is to build a cognitive model for the humanoid robot, especially, we are interested in the navigation and mapping on the humanoid robot. The agents used are the Alderbaran NAO robot. The framework is effectively applied to the integration of AI, computer vision, and signal processing problems. Our model can be divided into two parts, cognitive mapping and perception. Cognitive mapping is assumed as three parts, whose representations were proposed a network of ASRs, an MFIS, and a hierarchy of Place Representations. On the other hand, perception is the traditional computer vision problem, which is the image sensing, feature extraction and interested objects tracking. The points of our project can be concluded as the following. Firstly, the robotics should realize where it is. Second, we would like to test the theory that this is how humans map their environment. The humanoid robot inspires the human vision searching by integrating the visual mechanism and computer vision techniques.