 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePBWR: Parametric Building Wireframe Reconstruction from Aerial LiDAR Point Clouds
Paper and Code
Nov 18, 2023


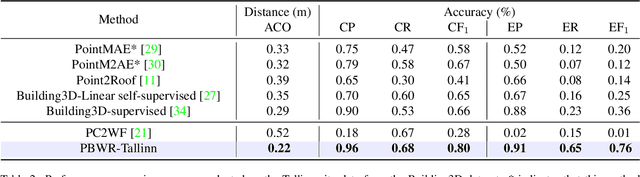
In this paper, we present an end-to-end 3D building wireframe reconstruction method to regress edges directly from aerial LiDAR point clouds.Our method, named Parametric Building Wireframe Reconstruction (PBWR), takes aerial LiDAR point clouds and initial edge entities as input, and fully uses self-attention mechanism of transformers to regress edge parameters without any intermediate steps such as corner prediction. We propose an edge non-maximum suppression (E-NMS) module based on edge similarityto remove redundant edges. Additionally, a dedicated edge loss function is utilized to guide the PBWR in regressing edges parameters, where simple use of edge distance loss isn't suitable. In our experiments, we demonstrate state-of-the-art results on the Building3D dataset, achieving an improvement of approximately 36% in entry-level dataset edge accuracy and around 42% improvement in the Tallinn dataset.