 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDVGBench: Implicit-to-Explicit Visual Grounding Benchmark in UAV Imagery with Large Vision-Language Models
Jan 02, 2026Remote sensing (RS) large vision-language models (LVLMs) have shown strong promise across visual grounding (VG) tasks. However, existing RS VG datasets predominantly rely on explicit referring expressions-such as relative position, relative size, and color cues-thereby constraining performance on implicit VG tasks that require scenario-specific domain knowledge. This article introduces DVGBench, a high-quality implicit VG benchmark for drones, covering six major application scenarios: traffic, disaster, security, sport, social activity, and productive activity. Each object provides both explicit and implicit queries. Based on the dataset, we design DroneVG-R1, an LVLM that integrates the novel Implicit-to-Explicit Chain-of-Thought (I2E-CoT) within a reinforcement learning paradigm. This enables the model to take advantage of scene-specific expertise, converting implicit references into explicit ones and thus reducing grounding difficulty. Finally, an evaluation of mainstream models on both explicit and implicit VG tasks reveals substantial limitations in their reasoning capabilities. These findings provide actionable insights for advancing the reasoning capacity of LVLMs for drone-based agents. The code and datasets will be released at https://github.com/zytx121/DVGBench
A Novel WaveInst-based Network for Tree Trunk Structure Extraction and Pattern Analysis in Forest Inventory
May 03, 2025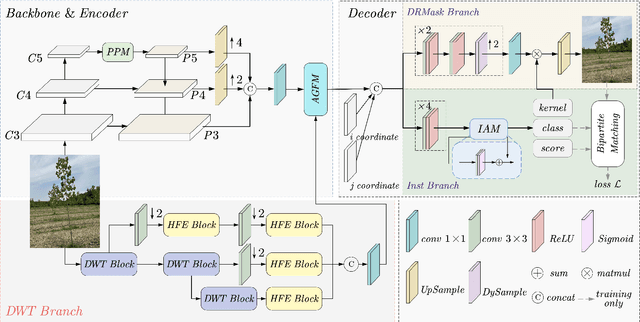
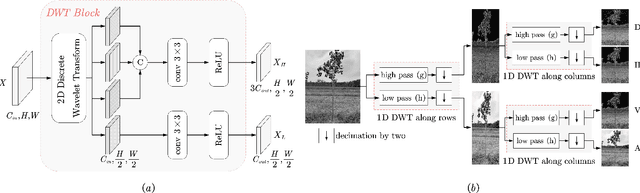
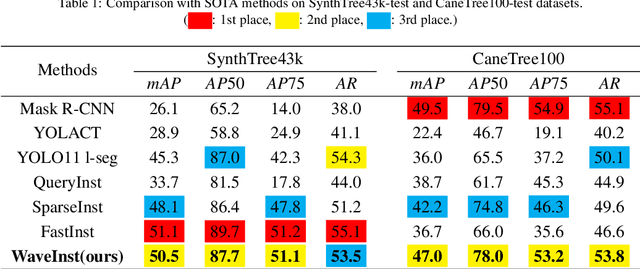
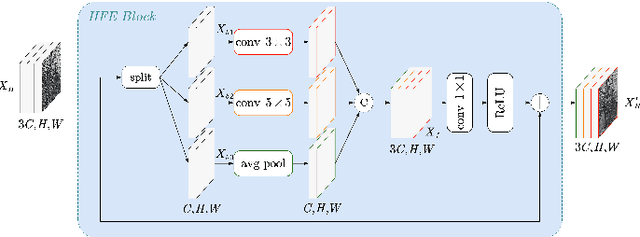
The pattern analysis of tree structure holds significant scientific value for genetic breeding and forestry management. The current trunk and branch extraction technologies are mainly LiDAR-based or UAV-based. The former approaches obtain high-precision 3D data, but its equipment cost is high and the three-dimensional (3D) data processing is complex. The latter approaches efficiently capture canopy information, but they miss the 3-D structure of trees. In order to deal with the branch information extraction from the complex background interference and occlusion, this work proposes a novel WaveInst instance segmentation framework, involving a discrete wavelet transform, to enhance multi-scale edge information for accurately improving tree structure extraction. Experimental results of the proposed model show superior performance on SynthTree43k, CaneTree100, Urban Street and our PoplarDataset. Moreover, we present a new Phenotypic dataset PoplarDataset, which is dedicated to extract tree structure and pattern analysis from artificial forest. The proposed method achieves a mean average precision of 49.6 and 24.3 for the structure extraction of mature and juvenile trees, respectively, surpassing the existing state-of-the-art method by 9.9. Furthermore, by in tegrating the segmentation model within the regression model, we accurately achieve significant tree grown parameters, such as the location of trees, the diameter-at-breast-height of individual trees, and the plant height, from 2D images directly. This study provides a scientific and plenty of data for tree structure analysis in related to the phenotype research, offering a platform for the significant applications in precision forestry, ecological monitoring, and intelligent breeding.
PBWR: Parametric Building Wireframe Reconstruction from Aerial LiDAR Point Clouds
Nov 18, 2023


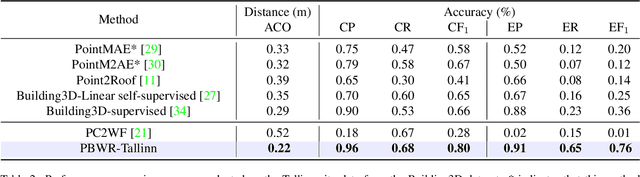
In this paper, we present an end-to-end 3D building wireframe reconstruction method to regress edges directly from aerial LiDAR point clouds.Our method, named Parametric Building Wireframe Reconstruction (PBWR), takes aerial LiDAR point clouds and initial edge entities as input, and fully uses self-attention mechanism of transformers to regress edge parameters without any intermediate steps such as corner prediction. We propose an edge non-maximum suppression (E-NMS) module based on edge similarityto remove redundant edges. Additionally, a dedicated edge loss function is utilized to guide the PBWR in regressing edges parameters, where simple use of edge distance loss isn't suitable. In our experiments, we demonstrate state-of-the-art results on the Building3D dataset, achieving an improvement of approximately 36% in entry-level dataset edge accuracy and around 42% improvement in the Tallinn dataset.
Building3D: An Urban-Scale Dataset and Benchmarks for Learning Roof Structures from Point Clouds
Jul 21, 2023Urban modeling from LiDAR point clouds is an important topic in computer vision, computer graphics, photogrammetry and remote sensing. 3D city models have found a wide range of applications in smart cities, autonomous navigation, urban planning and mapping etc. However, existing datasets for 3D modeling mainly focus on common objects such as furniture or cars. Lack of building datasets has become a major obstacle for applying deep learning technology to specific domains such as urban modeling. In this paper, we present a urban-scale dataset consisting of more than 160 thousands buildings along with corresponding point clouds, mesh and wire-frame models, covering 16 cities in Estonia about 998 Km2. We extensively evaluate performance of state-of-the-art algorithms including handcrafted and deep feature based methods. Experimental results indicate that Building3D has challenges of high intra-class variance, data imbalance and large-scale noises. The Building3D is the first and largest urban-scale building modeling benchmark, allowing a comparison of supervised and self-supervised learning methods. We believe that our Building3D will facilitate future research on urban modeling, aerial path planning, mesh simplification, and semantic/part segmentation etc.