 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-supervised Neural Articulated Shape and Appearance Models
May 17, 2022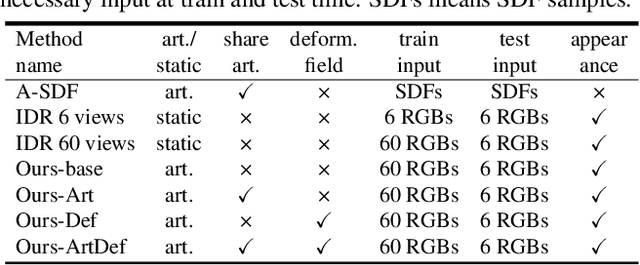

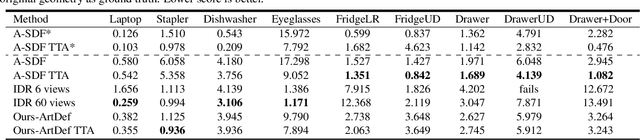

Learning geometry, motion, and appearance priors of object classes is important for the solution of a large variety of computer vision problems. While the majority of approaches has focused on static objects, dynamic objects, especially with controllable articulation, are less explored. We propose a novel approach for learning a representation of the geometry, appearance, and motion of a class of articulated objects given only a set of color images as input. In a self-supervised manner, our novel representation learns shape, appearance, and articulation codes that enable independent control of these semantic dimensions. Our model is trained end-to-end without requiring any articulation annotations. Experiments show that our approach performs well for different joint types, such as revolute and prismatic joints, as well as different combinations of these joints. Compared to state of the art that uses direct 3D supervision and does not output appearance, we recover more faithful geometry and appearance from 2D observations only. In addition, our representation enables a large variety of applications, such as few-shot reconstruction, the generation of novel articulations, and novel view-synthesis.
Deep Local Shapes: Learning Local SDF Priors for Detailed 3D Reconstruction
Apr 11, 2020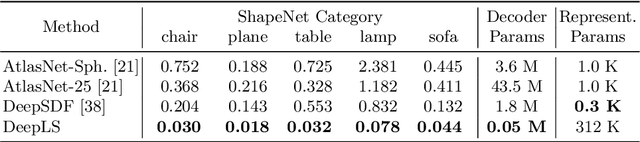
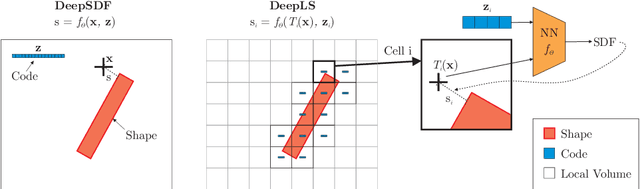

Efficiently reconstructing complex and intricate surfaces at scale is a long-standing goal in machine perception. To address this problem we introduce Deep Local Shapes (DeepLS), a deep shape representation that enables encoding and reconstruction of high-quality 3D shapes without prohibitive memory requirements. DeepLS replaces the dense volumetric signed distance function (SDF) representation used in traditional surface reconstruction systems with a set of locally learned continuous SDFs defined by a neural network, inspired by recent work such as DeepSDF. Unlike DeepSDF, which represents an object-level SDF with a neural network and a single latent code, we store a grid of independent latent codes, each responsible for storing information about surfaces in a small local neighborhood. This decomposition of scenes into local shapes simplifies the prior distribution that the network must learn, and also enables efficient inference. We demonstrate the effectiveness and generalization power of DeepLS by showing object shape encoding and reconstructions of full scenes, where DeepLS delivers high compression, accuracy, and local shape completion.
StereoDRNet: Dilated Residual Stereo Net
Apr 05, 2019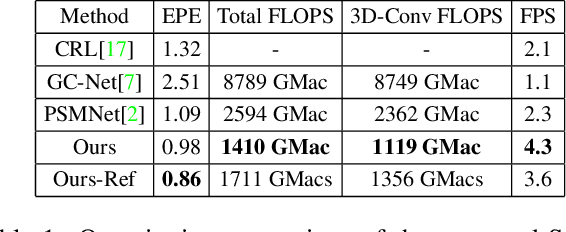
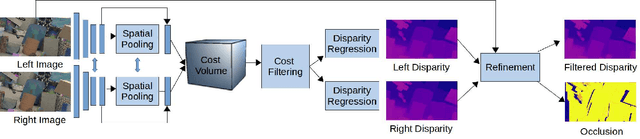
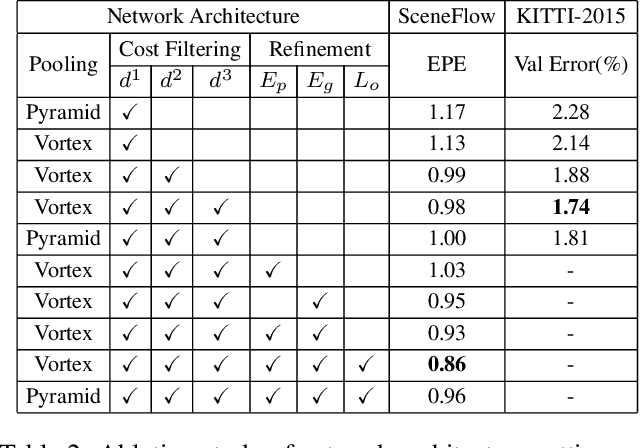
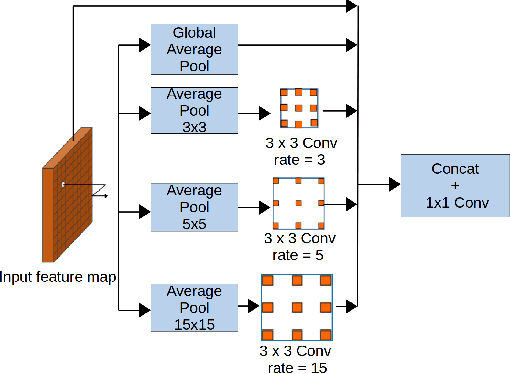
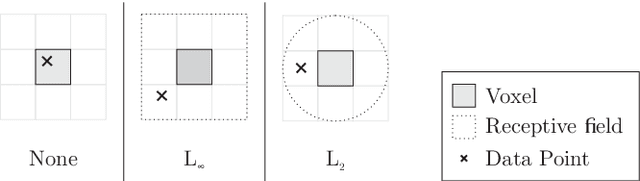
We propose a system that uses a convolution neural network (CNN) to estimate depth from a stereo pair followed by volumetric fusion of the predicted depth maps to produce a 3D reconstruction of a scene. Our proposed depth refinement architecture, predicts view-consistent disparity and occlusion maps that helps the fusion system to produce geometrically consistent reconstructions. We utilize 3D dilated convolutions in our proposed cost filtering network that yields better filtering while almost halving the computational cost in comparison to state of the art cost filtering architectures.For feature extraction we use the Vortex Pooling architecture. The proposed method achieves state of the art results in KITTI 2012, KITTI 2015 and ETH 3D stereo benchmarks. Finally, we demonstrate that our system is able to produce high fidelity 3D scene reconstructions that outperforms the state of the art stereo system.