 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Generating Realistic 3D Semantic Training Data for Autonomous Driving
Mar 27, 2025



Semantic scene understanding is crucial for robotics and computer vision applications. In autonomous driving, 3D semantic segmentation plays an important role for enabling safe navigation. Despite significant advances in the field, the complexity of collecting and annotating 3D data is a bottleneck in this developments. To overcome that data annotation limitation, synthetic simulated data has been used to generate annotated data on demand. There is still however a domain gap between real and simulated data. More recently, diffusion models have been in the spotlight, enabling close-to-real data synthesis. Those generative models have been recently applied to the 3D data domain for generating scene-scale data with semantic annotations. Still, those methods either rely on image projection or decoupled models trained with different resolutions in a coarse-to-fine manner. Such intermediary representations impact the generated data quality due to errors added in those transformations. In this work, we propose a novel approach able to generate 3D semantic scene-scale data without relying on any projection or decoupled trained multi-resolution models, achieving more realistic semantic scene data generation compared to previous state-of-the-art methods. Besides improving 3D semantic scene-scale data synthesis, we thoroughly evaluate the use of the synthetic scene samples as labeled data to train a semantic segmentation network. In our experiments, we show that using the synthetic annotated data generated by our method as training data together with the real semantic segmentation labels, leads to an improvement in the semantic segmentation model performance. Our results show the potential of generated scene-scale point clouds to generate more training data to extend existing datasets, reducing the data annotation effort. Our code is available at https://github.com/PRBonn/3DiSS.
3D Hierarchical Panoptic Segmentation in Real Orchard Environments Across Different Sensors
Mar 17, 2025Crop yield estimation is a relevant problem in agriculture, because an accurate crop yield estimate can support farmers' decisions on harvesting or precision intervention. Robots can help to automate this process. To do so, they need to be able to perceive the surrounding environment to identify target objects. In this paper, we introduce a novel approach to address the problem of hierarchical panoptic segmentation of apple orchards on 3D data from different sensors. Our approach is able to simultaneously provide semantic segmentation, instance segmentation of trunks and fruits, and instance segmentation of plants (a single trunk with its fruits). This allows us to identify relevant information such as individual plants, fruits, and trunks, and capture the relationship among them, such as precisely estimate the number of fruits associated to each tree in an orchard. Additionally, to efficiently evaluate our approach for hierarchical panoptic segmentation, we provide a dataset designed specifically for this task. Our dataset is recorded in Bonn in a real apple orchard with a variety of sensors, spanning from a terrestrial laser scanner to a RGB-D camera mounted on different robotic platforms. The experiments show that our approach surpasses state-of-the-art approaches in 3D panoptic segmentation in the agricultural domain, while also providing full hierarchical panoptic segmentation. Our dataset has been made publicly available at https://www.ipb.uni-bonn.de/data/hops/. We will provide the open-source implementation of our approach and public competiton for hierarchical panoptic segmentation on the hidden test sets upon paper acceptance.
Scaling Diffusion Models to Real-World 3D LiDAR Scene Completion
Mar 20, 2024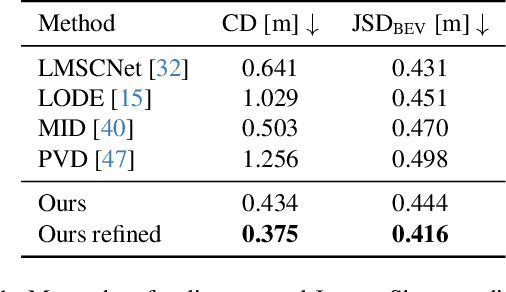
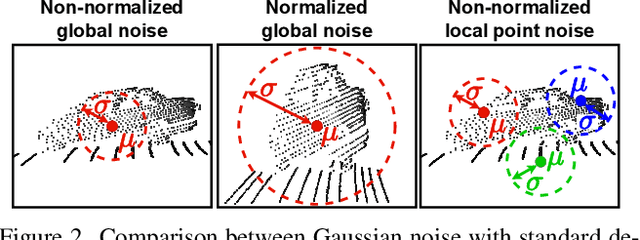
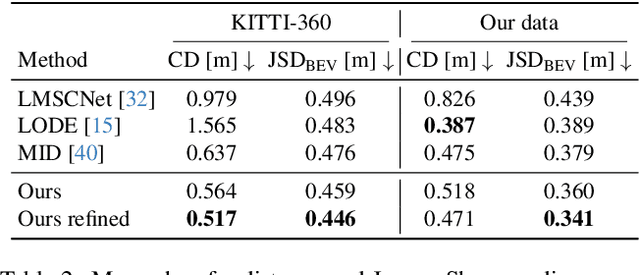
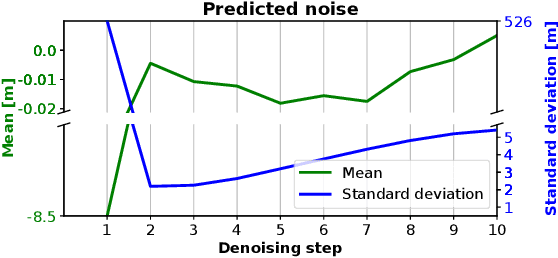
Computer vision techniques play a central role in the perception stack of autonomous vehicles. Such methods are employed to perceive the vehicle surroundings given sensor data. 3D LiDAR sensors are commonly used to collect sparse 3D point clouds from the scene. However, compared to human perception, such systems struggle to deduce the unseen parts of the scene given those sparse point clouds. In this matter, the scene completion task aims at predicting the gaps in the LiDAR measurements to achieve a more complete scene representation. Given the promising results of recent diffusion models as generative models for images, we propose extending them to achieve scene completion from a single 3D LiDAR scan. Previous works used diffusion models over range images extracted from LiDAR data, directly applying image-based diffusion methods. Distinctly, we propose to directly operate on the points, reformulating the noising and denoising diffusion process such that it can efficiently work at scene scale. Together with our approach, we propose a regularization loss to stabilize the noise predicted during the denoising process. Our experimental evaluation shows that our method can complete the scene given a single LiDAR scan as input, producing a scene with more details compared to state-of-the-art scene completion methods. We believe that our proposed diffusion process formulation can support further research in diffusion models applied to scene-scale point cloud data.
Automatic Labeling to Generate Training Data for Online LiDAR-based Moving Object Segmentation
Jan 12, 2022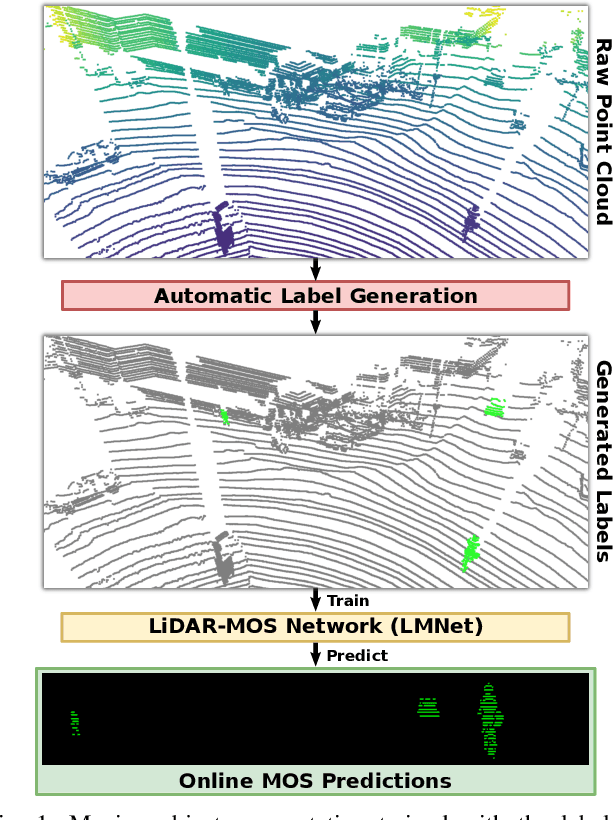
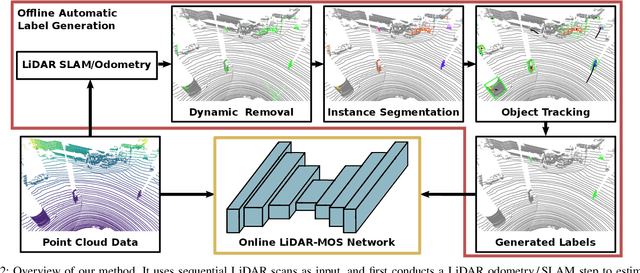
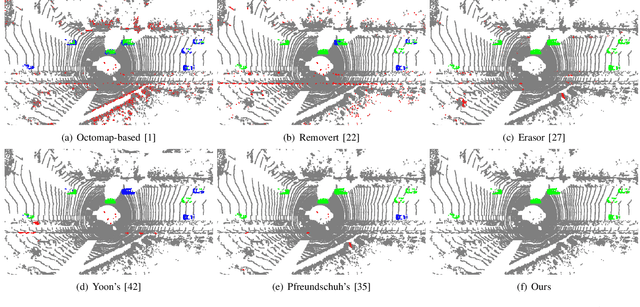
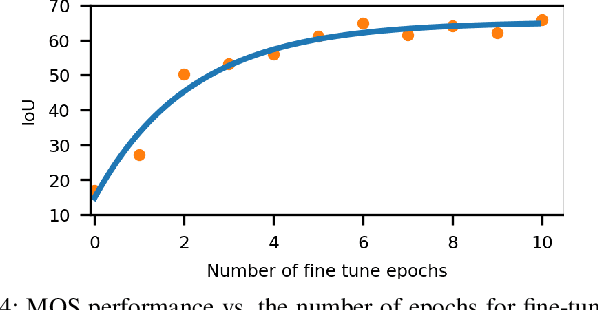
Understanding the scene is key for autonomously navigating vehicles and the ability to segment the surroundings online into moving and non-moving objects is a central ingredient for this task. Often, deep learning-based methods are used to perform moving object segmentation (MOS). The performance of these networks, however, strongly depends on the diversity and amount of labeled training data, information that may be costly to obtain. In this paper, we propose an automatic data labeling pipeline for 3D LiDAR data to save the extensive manual labeling effort and to improve the performance of existing learning-based MOS systems by automatically generating labeled training data. Our proposed approach achieves this by processing the data offline in batches. It first exploits an occupancy-based dynamic object removal to detect possible dynamic objects coarsely. Second, it extracts segments among the proposals and tracks them using a Kalman filter. Based on the tracked trajectories, it labels the actually moving objects such as driving cars and pedestrians as moving. In contrast, the non-moving objects, e.g., parked cars, lamps, roads, or buildings, are labeled as static. We show that this approach allows us to label LiDAR data highly effectively and compare our results to those of other label generation methods. We also train a deep neural network with our auto-generated labels and achieve similar performance compared to the one trained with manual labels on the same data, and an even better performance when using additional datasets with labels generated by our approach. Furthermore, we evaluate our method on multiple datasets using different sensors and our experiments indicate that our method can generate labels in diverse environments.