 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver Age and Its Effect on Key Driving Metrics: Insights from Dynamic Vehicle Data
Jan 12, 2025By 2030, the senior population aged 65 and older is expected to increase by over 50%, significantly raising the number of older drivers on the road. Drivers over 70 face higher crash death rates compared to those in their forties and fifties, underscoring the importance of developing more effective safety interventions for this demographic. Although the impact of aging on driving behavior has been studied, there is limited research on how these behaviors translate into real-world driving scenarios. This study addresses this need by leveraging Naturalistic Driving Data (NDD) to analyze driving performance measures - specifically, speed limit adherence on interstates and deceleration at stop intersections, both of which may be influenced by age-related declines. Using NDD, we developed Cumulative Distribution Functions (CDFs) to establish benchmarks for key driving behaviors among senior and young drivers. Our analysis, which included anomaly detection, benchmark comparisons, and accuracy evaluations, revealed significant differences in driving patterns primarily related to speed limit adherence at 75mph. While our approach shows promising potential for enhancing Advanced Driver Assistance Systems (ADAS) by providing tailored interventions based on age-specific adherence to speed limit driving patterns, we recognize the need for additional data to refine and validate metrics for other driving behaviors. By establishing precise benchmarks for various driving performance metrics, ADAS can effectively identify anomalies, such as abrupt deceleration, which may indicate impaired driving or other safety concerns. This study lays a strong foundation for future research aimed at improving safety interventions through detailed driving behavior analysis.
Investigating Speed Deviation Patterns During Glucose Episodes: A Quantile Regression Approach
Oct 03, 2023



Given the growing prevalence of diabetes, there has been significant interest in determining how diabetes affects instrumental daily functions, like driving. Complication of glucose control in diabetes includes hypoglycemic and hyperglycemic episodes, which may impair cognitive and psychomotor functions needed for safe driving. The goal of this paper was to determine patterns of diabetes speed behavior during acute glucose to drivers with diabetes who were euglycemic or control drivers without diabetes in a naturalistic driving environment. By employing distribution-based analytic methods which capture distribution patterns, our study advances prior literature that has focused on conventional approach of average speed to explore speed deviation patterns.
Vision-based Analysis of Driver Activity and Driving Performance Under the Influence of Alcohol
Sep 14, 2023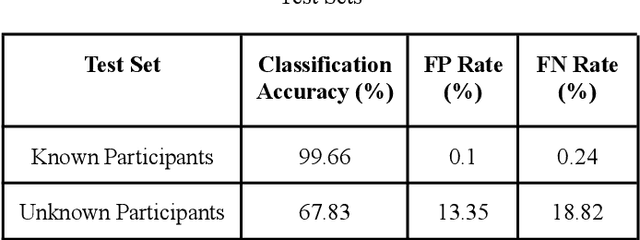
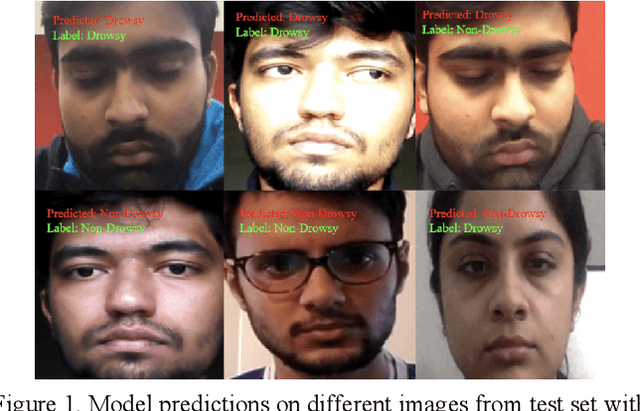
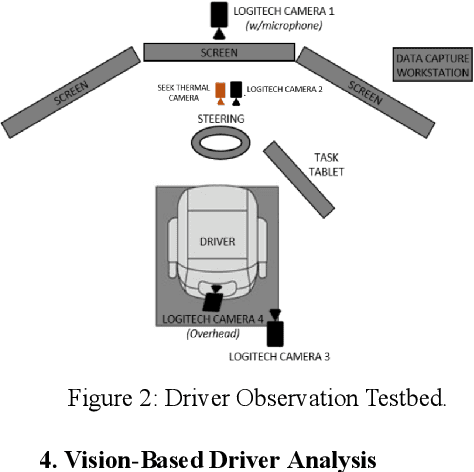
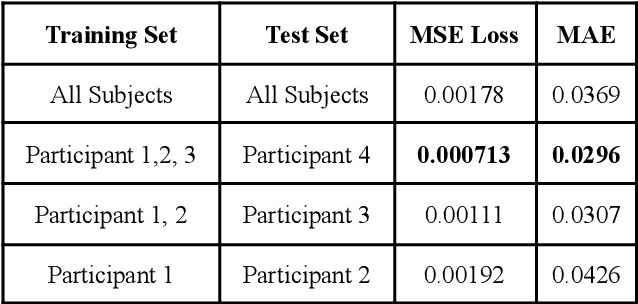
About 30% of all traffic crash fatalities in the United States involve drunk drivers, making the prevention of drunk driving paramount to vehicle safety in the US and other locations which have a high prevalence of driving while under the influence of alcohol. Driving impairment can be monitored through active use of sensors (when drivers are asked to engage in providing breath samples to a vehicle instrument or when pulled over by a police officer), but a more passive and robust mechanism of sensing may allow for wider adoption and benefit of intelligent systems that reduce drunk driving accidents. This could assist in identifying impaired drivers before they drive, or early in the driving process (before a crash or detection by law enforcement). In this research, we introduce a study which adopts a multi-modal ensemble of visual, thermal, audio, and chemical sensors to (1) examine the impact of acute alcohol administration on driving performance in a driving simulator, and (2) identify data-driven methods for detecting driving under the influence of alcohol. We describe computer vision and machine learning models for analyzing the driver's face in thermal imagery, and introduce a pipeline for training models on data collected from drivers with a range of breath-alcohol content levels, including discussion of relevant machine learning phenomena which can help in future experiment design for related studies.
Safe Control Transitions: Machine Vision Based Observable Readiness Index and Data-Driven Takeover Time Prediction
Jan 18, 2023



To make safe transitions from autonomous to manual control, a vehicle must have a representation of the awareness of driver state; two metrics which quantify this state are the Observable Readiness Index and Takeover Time. In this work, we show that machine learning models which predict these two metrics are robust to multiple camera views, expanding from the limited view angles in prior research. Importantly, these models take as input feature vectors corresponding to hand location and activity as well as gaze location, and we explore the tradeoffs of different views in generating these feature vectors. Further, we introduce two metrics to evaluate the quality of control transitions following the takeover event (the maximal lateral deviation and velocity deviation) and compute correlations of these post-takeover metrics to the pre-takeover predictive metrics.
Predicting Take-over Time for Autonomous Driving with Real-World Data: Robust Data Augmentation, Models, and Evaluation
Jul 27, 2021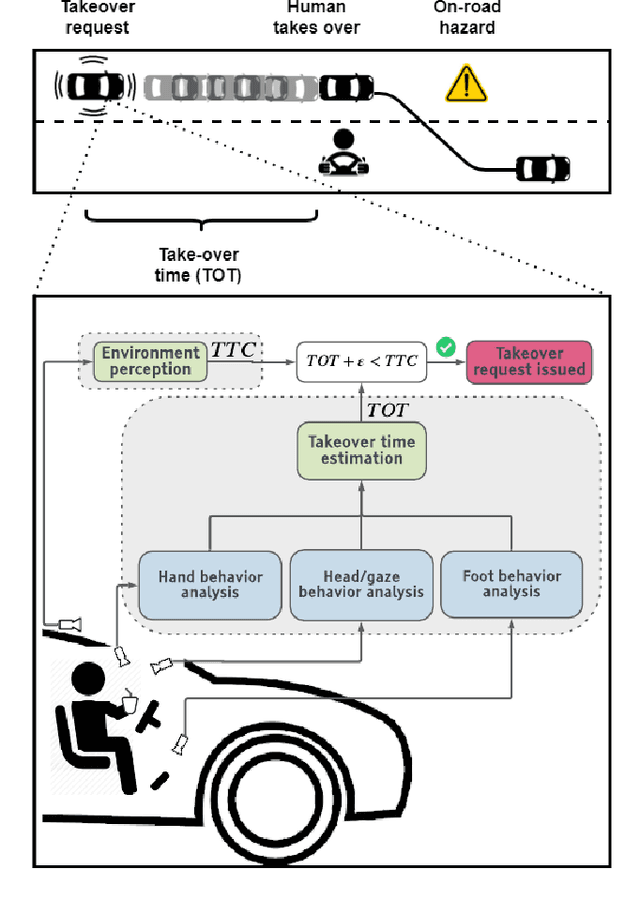
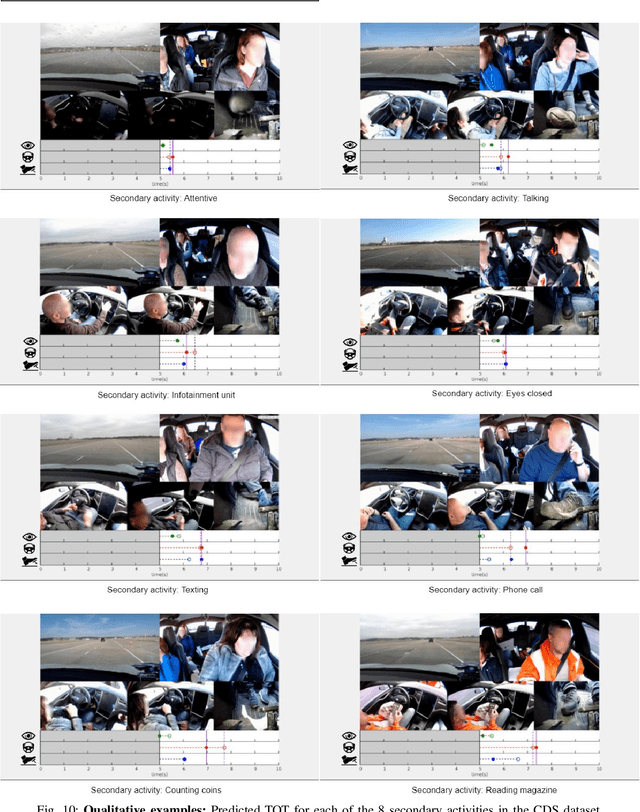
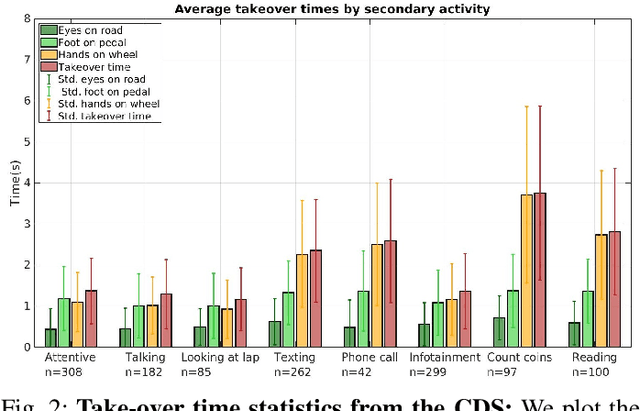
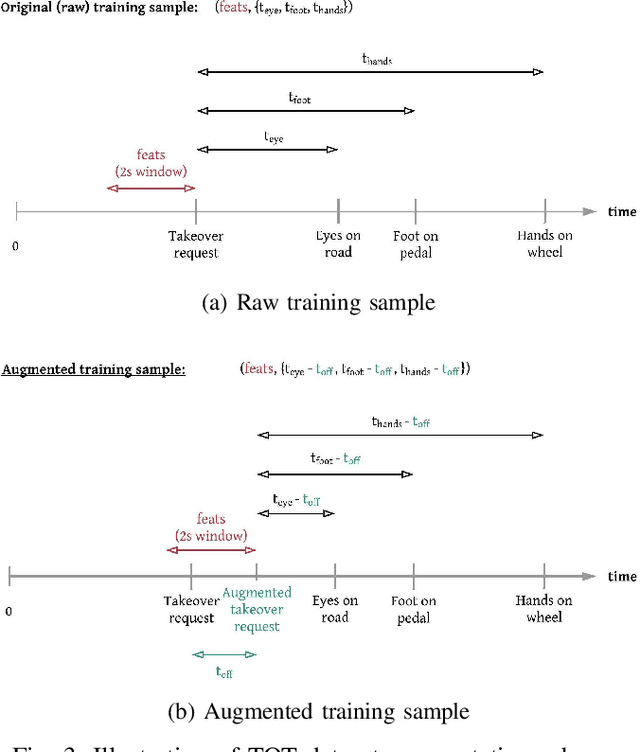
Understanding occupant-vehicle interactions by modeling control transitions is important to ensure safe approaches to passenger vehicle automation. Models which contain contextual, semantically meaningful representations of driver states can be used to determine the appropriate timing and conditions for transfer of control between driver and vehicle. However, such models rely on real-world control take-over data from drivers engaged in distracting activities, which is costly to collect. Here, we introduce a scheme for data augmentation for such a dataset. Using the augmented dataset, we develop and train take-over time (TOT) models that operate sequentially on mid and high-level features produced by computer vision algorithms operating on different driver-facing camera views, showing models trained on the augmented dataset to outperform the initial dataset. The demonstrated model features encode different aspects of the driver state, pertaining to the face, hands, foot and upper body of the driver. We perform ablative experiments on feature combinations as well as model architectures, showing that a TOT model supported by augmented data can be used to produce continuous estimates of take-over times without delay, suitable for complex real-world scenarios.
Autonomous Vehicles that Alert Humans to Take-Over Controls: Modeling with Real-World Data
Apr 23, 2021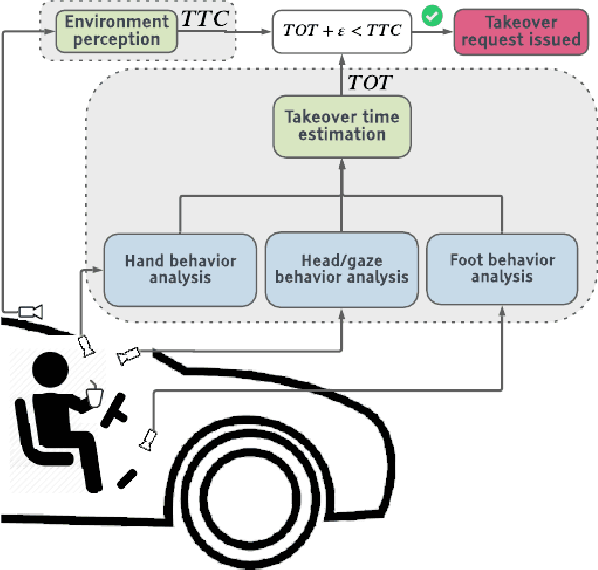
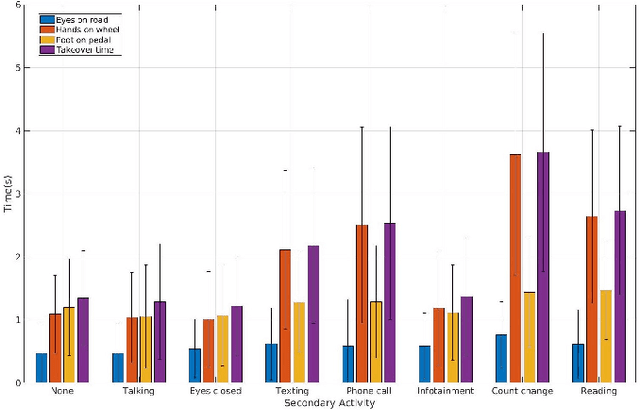
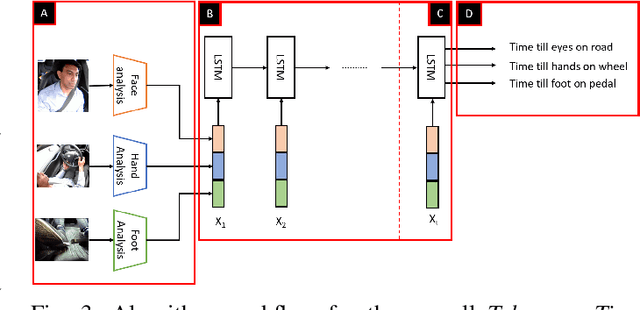
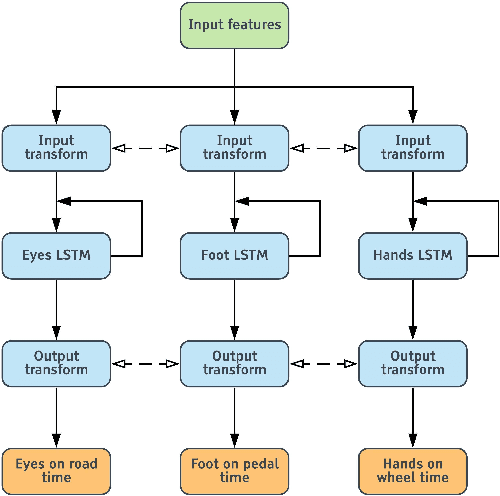
With increasing automation in passenger vehicles, the study of safe and smooth occupant-vehicle interaction and control transitions is key. In this study, we focus on the development of contextual, semantically meaningful representations of the driver state, which can then be used to determine the appropriate timing and conditions for transfer of control between driver and vehicle. To this end, we conduct a large-scale real-world controlled data study where participants are instructed to take-over control from an autonomous agent under different driving conditions while engaged in a variety of distracting activities. These take-over events are captured using multiple driver-facing cameras, which when labelled result in a dataset of control transitions and their corresponding take-over times (TOTs). After augmenting this dataset, we develop and train TOT models that operate sequentially on low and mid-level features produced by computer vision algorithms operating on different driver-facing camera views. The proposed TOT model produces continuous estimates of take-over times without delay, and shows promising qualitative and quantitative results in complex real-world scenarios.
A Multimodal, Full-Surround Vehicular Testbed for Naturalistic Studies and Benchmarking: Design, Calibration and Deployment
Mar 20, 2018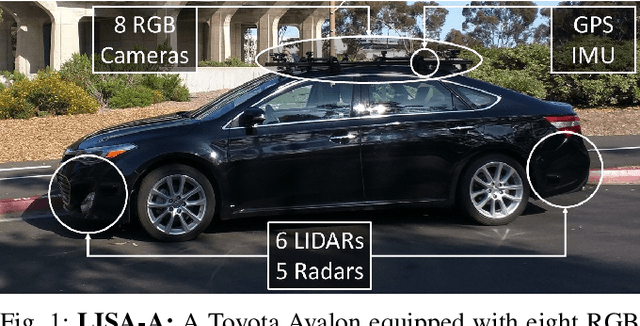
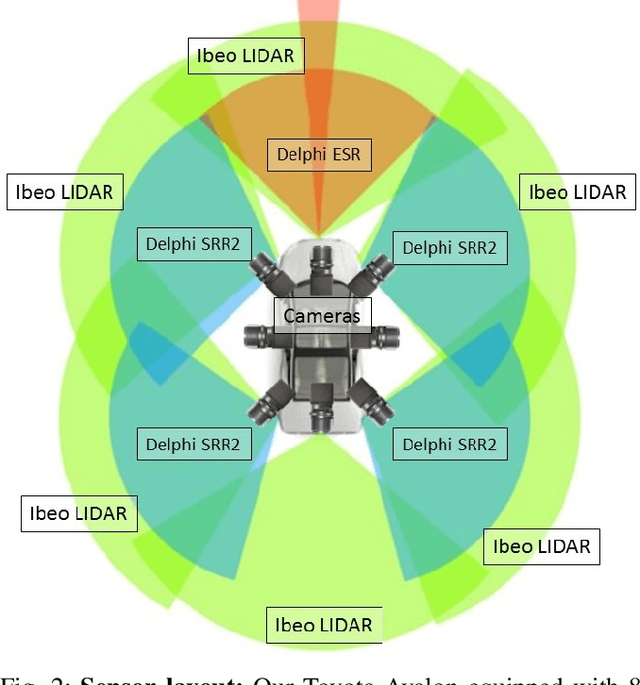
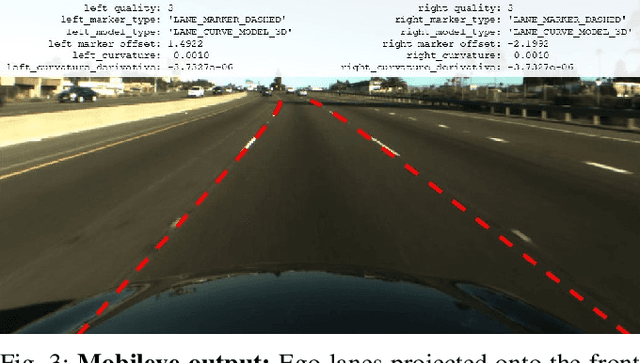
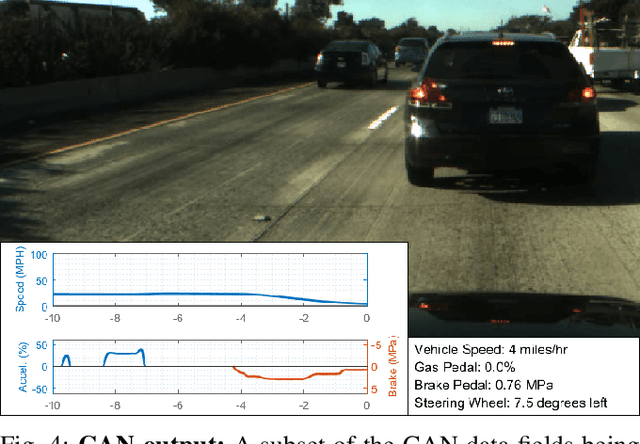
Recent progress in autonomous and semi-autonomous driving has been made possible in part through an assortment of sensors that provide the intelligent agent with an enhanced perception of its surroundings. It has been clear for quite some while now that for intelligent vehicles to function effectively in all situations and conditions, a fusion of different sensor technologies is essential. Consequently, the availability of synchronized multi-sensory data streams are necessary to promote the development of fusion based algorithms for low, mid and high level semantic tasks. In this paper, we provide a comprehensive description of LISA-A: our heavily sensorized, full-surround testbed capable of providing high quality data from a slew of synchronized and calibrated sensors such as cameras, LIDARs, radars, and the IMU/GPS. The vehicle has recorded over 100 hours of real world data for a very diverse set of weather, traffic and daylight conditions. All captured data is accurately calibrated and synchronized using timestamps, and stored safely in high performance servers mounted inside the vehicle itself. Details on the testbed instrumentation, sensor layout, sensor outputs, calibration and synchronization are described in this paper.