 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver Age and Its Effect on Key Driving Metrics: Insights from Dynamic Vehicle Data
Jan 12, 2025By 2030, the senior population aged 65 and older is expected to increase by over 50%, significantly raising the number of older drivers on the road. Drivers over 70 face higher crash death rates compared to those in their forties and fifties, underscoring the importance of developing more effective safety interventions for this demographic. Although the impact of aging on driving behavior has been studied, there is limited research on how these behaviors translate into real-world driving scenarios. This study addresses this need by leveraging Naturalistic Driving Data (NDD) to analyze driving performance measures - specifically, speed limit adherence on interstates and deceleration at stop intersections, both of which may be influenced by age-related declines. Using NDD, we developed Cumulative Distribution Functions (CDFs) to establish benchmarks for key driving behaviors among senior and young drivers. Our analysis, which included anomaly detection, benchmark comparisons, and accuracy evaluations, revealed significant differences in driving patterns primarily related to speed limit adherence at 75mph. While our approach shows promising potential for enhancing Advanced Driver Assistance Systems (ADAS) by providing tailored interventions based on age-specific adherence to speed limit driving patterns, we recognize the need for additional data to refine and validate metrics for other driving behaviors. By establishing precise benchmarks for various driving performance metrics, ADAS can effectively identify anomalies, such as abrupt deceleration, which may indicate impaired driving or other safety concerns. This study lays a strong foundation for future research aimed at improving safety interventions through detailed driving behavior analysis.
Investigating Speed Deviation Patterns During Glucose Episodes: A Quantile Regression Approach
Oct 03, 2023



Given the growing prevalence of diabetes, there has been significant interest in determining how diabetes affects instrumental daily functions, like driving. Complication of glucose control in diabetes includes hypoglycemic and hyperglycemic episodes, which may impair cognitive and psychomotor functions needed for safe driving. The goal of this paper was to determine patterns of diabetes speed behavior during acute glucose to drivers with diabetes who were euglycemic or control drivers without diabetes in a naturalistic driving environment. By employing distribution-based analytic methods which capture distribution patterns, our study advances prior literature that has focused on conventional approach of average speed to explore speed deviation patterns.
Driver Maneuver Detection and Analysis using Time Series Segmentation and Classification
Nov 10, 2022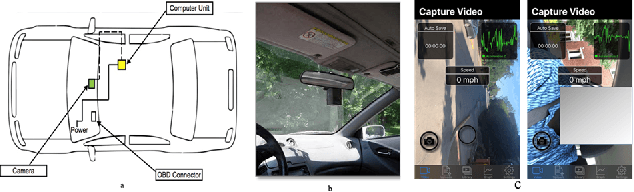
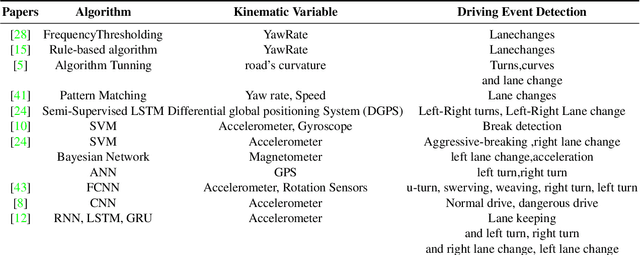
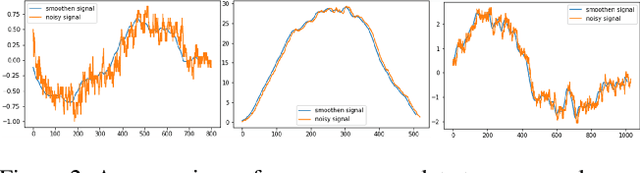
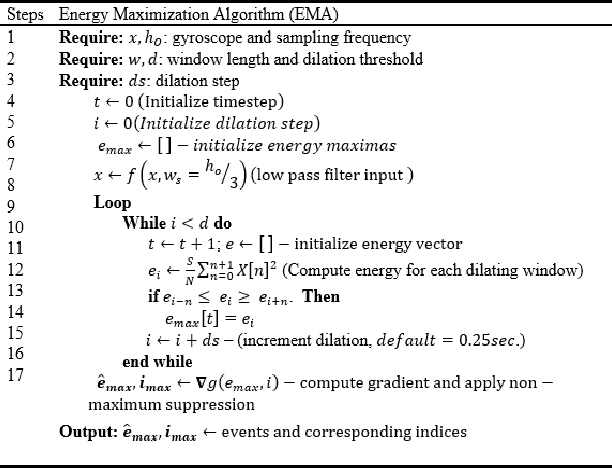
The current paper implements a methodology for automatically detecting vehicle maneuvers from vehicle telemetry data under naturalistic driving settings. Previous approaches have treated vehicle maneuver detection as a classification problem, although both time series segmentation and classification are required since input telemetry data is continuous. Our objective is to develop an end-to-end pipeline for frame-by-frame annotation of naturalistic driving studies videos into various driving events including stop and lane keeping events, lane changes, left-right turning movements, and horizontal curve maneuvers. To address the time series segmentation problem, the study developed an Energy Maximization Algorithm (EMA) capable of extracting driving events of varying durations and frequencies from continuous signal data. To reduce overfitting and false alarm rates, heuristic algorithms were used to classify events with highly variable patterns such as stops and lane-keeping. To classify segmented driving events, four machine learning models were implemented, and their accuracy and transferability were assessed over multiple data sources. The duration of events extracted by EMA were comparable to actual events, with accuracies ranging from 59.30% (left lane change) to 85.60% (lane-keeping). Additionally, the overall accuracy of the 1D-convolutional neural network model was 98.99%, followed by the Long-short-term-memory model at 97.75%, then random forest model at 97.71%, and the support vector machine model at 97.65%. These model accuracies where consistent across different data sources. The study concludes that implementing a segmentation-classification pipeline significantly improves both the accuracy for driver maneuver detection and transferability of shallow and deep ML models across diverse datasets.
Driver Behavior Analysis Using Lane Departure Detection Under Challenging Conditions
May 31, 2019



In this paper, we present a novel model to detect lane regions and extract lane departure events (changes and incursions) from challenging, lower-resolution videos recorded with mobile cameras. Our algorithm used a Mask-RCNN based lane detection model as pre-processor. Recently, deep learning-based models provide state-of-the-art technology for object detection combined with segmentation. Among the several deep learning architectures, convolutional neural networks (CNNs) outperformed other machine learning models, especially for region proposal and object detection tasks. Recent development in object detection has been driven by the success of region proposal methods and region-based CNNs (R-CNNs). Our algorithm utilizes lane segmentation mask for detection and Fix-lag Kalman filter for tracking, rather than the usual approach of detecting lane lines from single video frames. The algorithm permits detection of driver lane departures into left or right lanes from continuous lane detections. Preliminary results show promise for robust detection of lane departure events. The overall sensitivity for lane departure events on our custom test dataset is 81.81%.