 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperdimensional Uncertainty Quantification for Multimodal Uncertainty Fusion in Autonomous Vehicles Perception
Mar 25, 2025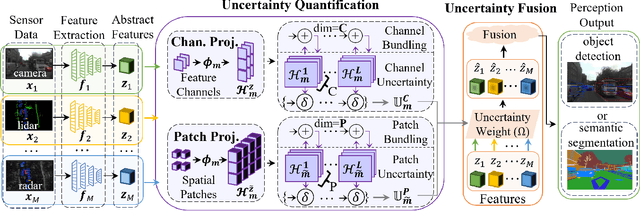
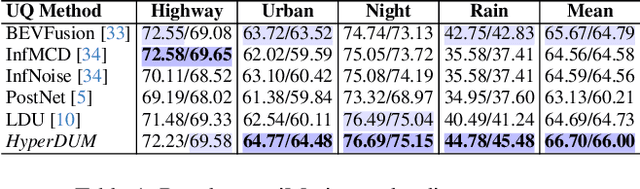
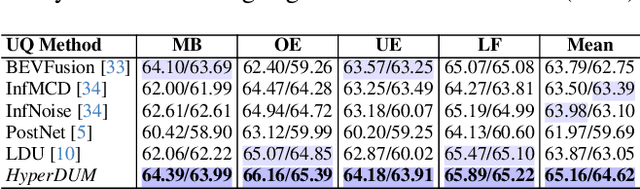
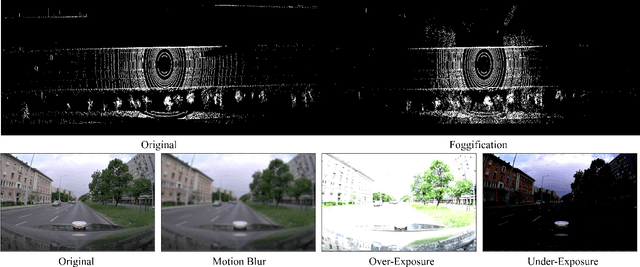
Uncertainty Quantification (UQ) is crucial for ensuring the reliability of machine learning models deployed in real-world autonomous systems. However, existing approaches typically quantify task-level output prediction uncertainty without considering epistemic uncertainty at the multimodal feature fusion level, leading to sub-optimal outcomes. Additionally, popular uncertainty quantification methods, e.g., Bayesian approximations, remain challenging to deploy in practice due to high computational costs in training and inference. In this paper, we propose HyperDUM, a novel deterministic uncertainty method (DUM) that efficiently quantifies feature-level epistemic uncertainty by leveraging hyperdimensional computing. Our method captures the channel and spatial uncertainties through channel and patch -wise projection and bundling techniques respectively. Multimodal sensor features are then adaptively weighted to mitigate uncertainty propagation and improve feature fusion. Our evaluations show that HyperDUM on average outperforms the state-of-the-art (SOTA) algorithms by up to 2.01%/1.27% in 3D Object Detection and up to 1.29% improvement over baselines in semantic segmentation tasks under various types of uncertainties. Notably, HyperDUM requires 2.36x less Floating Point Operations and up to 38.30x less parameters than SOTA methods, providing an efficient solution for real-world autonomous systems.
Mixed-Precision Neural Networks: A Survey
Aug 11, 2022
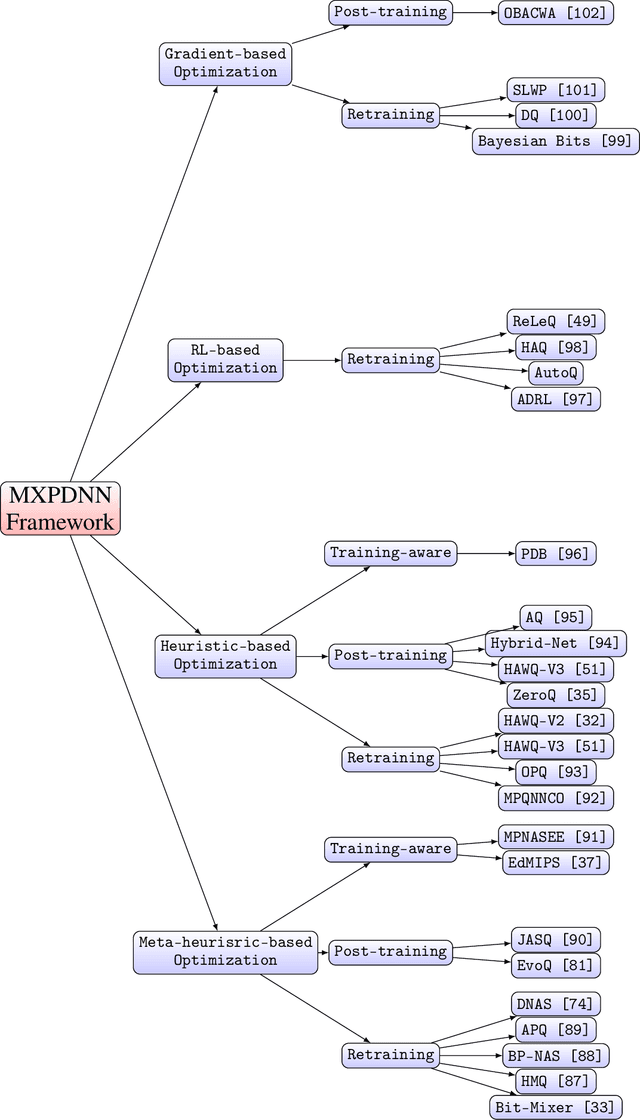

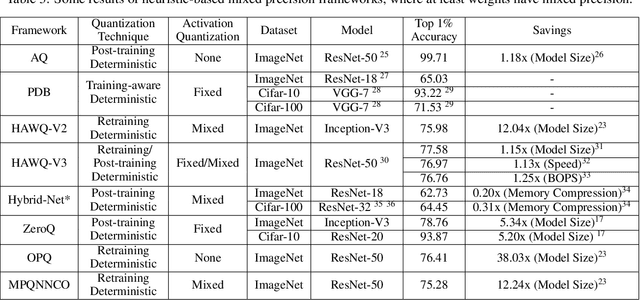
Mixed-precision Deep Neural Networks achieve the energy efficiency and throughput needed for hardware deployment, particularly when the resources are limited, without sacrificing accuracy. However, the optimal per-layer bit precision that preserves accuracy is not easily found, especially with the abundance of models, datasets, and quantization techniques that creates an enormous search space. In order to tackle this difficulty, a body of literature has emerged recently, and several frameworks that achieved promising accuracy results have been proposed. In this paper, we start by summarizing the quantization techniques used generally in literature. Then, we present a thorough survey of the mixed-precision frameworks, categorized according to their optimization techniques such as reinforcement learning and quantization techniques like deterministic rounding. Furthermore, the advantages and shortcomings of each framework are discussed, where we present a juxtaposition. We finally give guidelines for future mixed-precision frameworks.
Generative Adversarial Imitation Learning for Empathy-based AI
May 27, 2021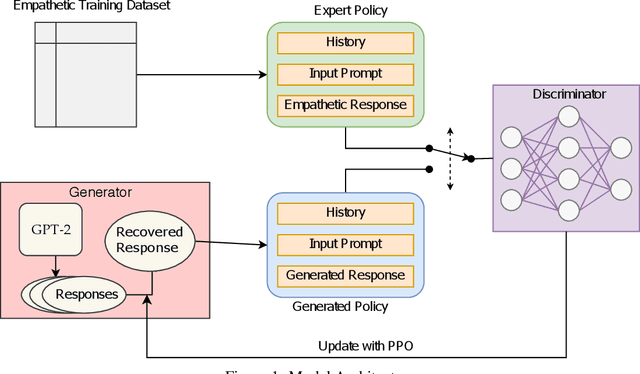
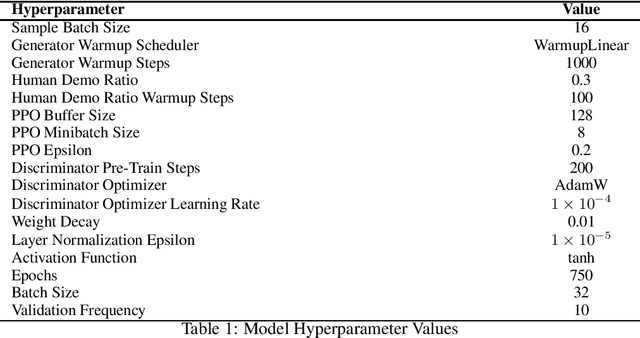
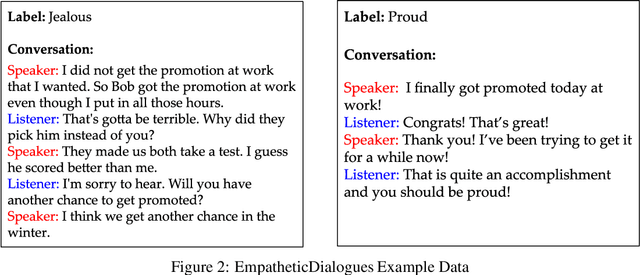
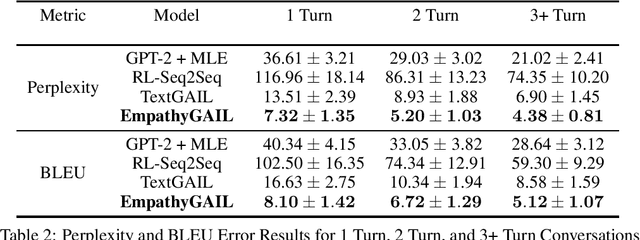
Generative adversarial imitation learning (GAIL) is a model-free algorithm that has been shown to provide strong results in imitating complex behaviors in high-dimensional environments. In this paper, we utilize the GAIL model for text generation to develop empathy-based context-aware conversational AI. Our model uses an expert trajectory of empathetic prompt-response dialogues which can accurately exhibit the correct empathetic emotion when generating a response. The Generator of the GAIL model uses the GPT-2 sequential pre-trained language model trained on 117 million parameters from 40 GB of internet data. We propose a novel application of an approach used in transfer learning to fine tune the GPT-2 model in order to generate concise, user-specific empathetic responses validated against the Discriminator. Our novel GAIL model utilizes a sentiment analysis history-based reinforcement learning approach to empathetically respond to human interactions in a personalized manner. We find that our model's response scores on various human-generated prompts collected from the Facebook Empathetic Dialogues dataset outperform baseline counterparts. Moreover, our model improves upon various history-based conversational AI models developed recently, as our model's performance over a sustained conversation of 3 or more interactions outperform similar conversational AI models.
A Meta-Learning Control Algorithm with Provable Finite-Time Guarantees
Sep 10, 2020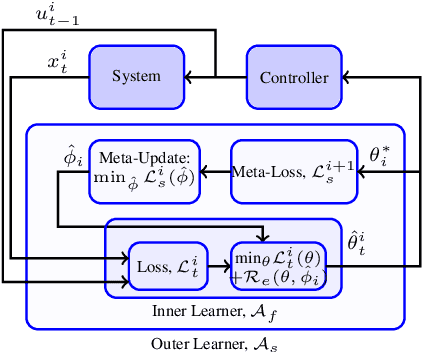
In this work we provide provable regret guarantees for an online meta-learning control algorithm in an iterative control setting, where in each iteration the system to be controlled is a linear deterministic system that is different and unknown, the cost for the controller in an iteration is a general additive cost function and the control input is required to be constrained, which if violated incurs an additional cost. We prove (i) that the algorithm achieves a regret for the controller cost and constraint violation that are $O(T^{3/4})$ for an episode of duration $T$ with respect to the best policy that satisfies the control input control constraints and (ii) that the average of the regret for the controller cost and constraint violation with respect to the same policy vary as $O((1+\log(N)/N)T^{3/4})$ with the number of iterations $N$, showing that the worst regret for the learning within an iteration continuously improves with experience of more iterations.
An Approximation Algorithm for a Shortest Dubins Path Problem
Apr 18, 2016



The problem of finding the shortest path for a vehicle visiting a given sequence of target points subject to the motion constraints of the vehicle is an important problem that arises in several monitoring and surveillance applications involving unmanned aerial vehicles. There is currently no algorithm that can find an optimal solution to this problem. Therefore, heuristics that can find approximate solutions with guarantees on the quality of the solutions are useful. The best approximation algorithm currently available for the case when the distance between any two adjacent target points in the sequence is at least equal to twice the minimum radius of the vehicle has a guarantee of 3.04. This article provides a new approximation algorithm which improves this guarantee to 2.04. The developed algorithm is also implemented for hundreds of typical instances involving at most 30 points to corroborate the performance of the proposed approach.