 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJust a Few Glances: Open-Set Visual Perception with Image Prompt Paradigm
Dec 14, 2024



To break through the limitations of pre-training models on fixed categories, Open-Set Object Detection (OSOD) and Open-Set Segmentation (OSS) have attracted a surge of interest from researchers. Inspired by large language models, mainstream OSOD and OSS methods generally utilize text as a prompt, achieving remarkable performance. Following SAM paradigm, some researchers use visual prompts, such as points, boxes, and masks that cover detection or segmentation targets. Despite these two prompt paradigms exhibit excellent performance, they also reveal inherent limitations. On the one hand, it is difficult to accurately describe characteristics of specialized category using textual description. On the other hand, existing visual prompt paradigms heavily rely on multi-round human interaction, which hinders them being applied to fully automated pipeline. To address the above issues, we propose a novel prompt paradigm in OSOD and OSS, that is, \textbf{Image Prompt Paradigm}. This brand new prompt paradigm enables to detect or segment specialized categories without multi-round human intervention. To achieve this goal, the proposed image prompt paradigm uses just a few image instances as prompts, and we propose a novel framework named \textbf{MI Grounding} for this new paradigm. In this framework, high-quality image prompts are automatically encoded, selected and fused, achieving the single-stage and non-interactive inference. We conduct extensive experiments on public datasets, showing that MI Grounding achieves competitive performance on OSOD and OSS benchmarks compared to text prompt paradigm methods and visual prompt paradigm methods. Moreover, MI Grounding can greatly outperform existing method on our constructed specialized ADR50K dataset.
DSE-GAN: Dynamic Semantic Evolution Generative Adversarial Network for Text-to-Image Generation
Sep 03, 2022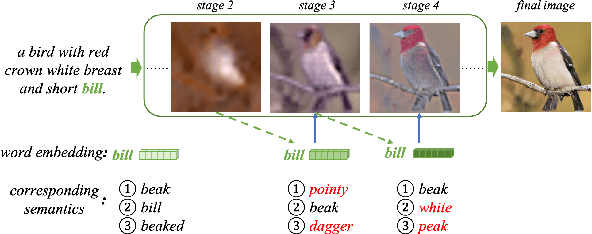


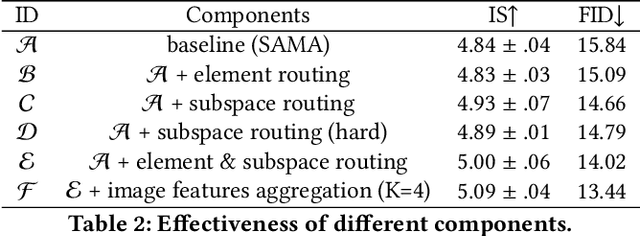
Text-to-image generation aims at generating realistic images which are semantically consistent with the given text. Previous works mainly adopt the multi-stage architecture by stacking generator-discriminator pairs to engage multiple adversarial training, where the text semantics used to provide generation guidance remain static across all stages. This work argues that text features at each stage should be adaptively re-composed conditioned on the status of the historical stage (i.e., historical stage's text and image features) to provide diversified and accurate semantic guidance during the coarse-to-fine generation process. We thereby propose a novel Dynamical Semantic Evolution GAN (DSE-GAN) to re-compose each stage's text features under a novel single adversarial multi-stage architecture. Specifically, we design (1) Dynamic Semantic Evolution (DSE) module, which first aggregates historical image features to summarize the generative feedback, and then dynamically selects words required to be re-composed at each stage as well as re-composed them by dynamically enhancing or suppressing different granularity subspace's semantics. (2) Single Adversarial Multi-stage Architecture (SAMA), which extends the previous structure by eliminating complicated multiple adversarial training requirements and therefore allows more stages of text-image interactions, and finally facilitates the DSE module. We conduct comprehensive experiments and show that DSE-GAN achieves 7.48\% and 37.8\% relative FID improvement on two widely used benchmarks, i.e., CUB-200 and MSCOCO, respectively.
Spatial Location Constraint Prototype Loss for Open Set Recognition
Nov 12, 2021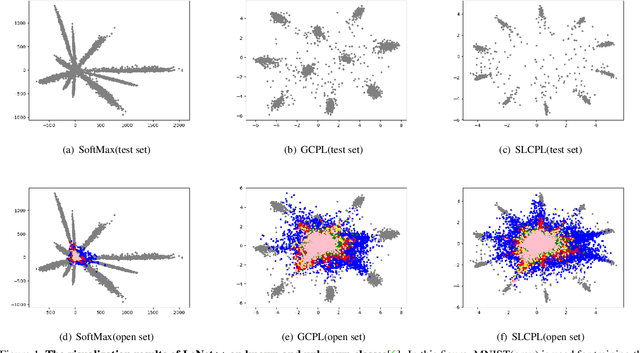
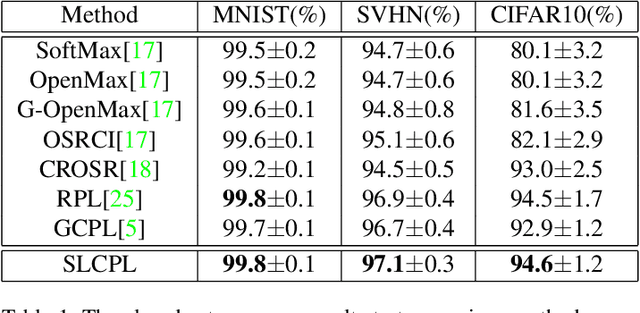
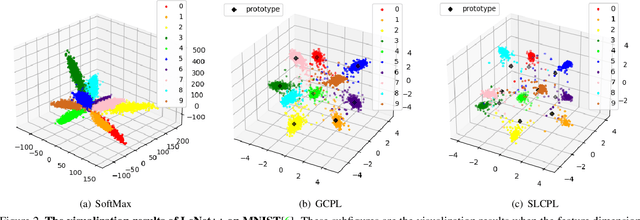
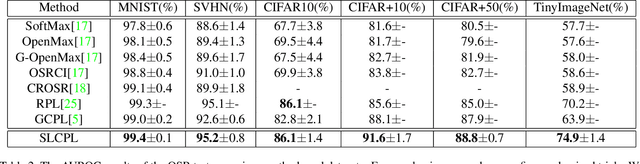
One of the challenges in pattern recognition is open set recognition. Compared with closed set recognition, open set recognition needs to reduce not only the empirical risk, but also the open space risk, and the reduction of these two risks corresponds to classifying the known classes and identifying the unknown classes respectively. How to reduce the open space risk is the key of open set recognition. This paper explores the origin of the open space risk by analyzing the distribution of known and unknown classes features. On this basis, the spatial location constraint prototype loss function is proposed to reduce the two risks simultaneously. Extensive experiments on multiple benchmark datasets and many visualization results indicate that our methods is superior to most existing approaches.
Adversarial Motorial Prototype Framework for Open Set Recognition
Jul 13, 2021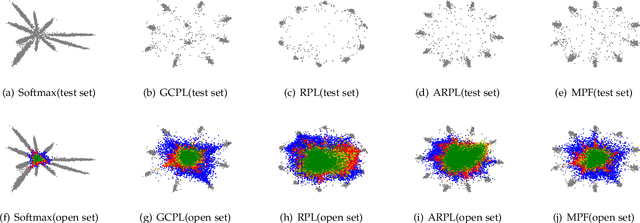
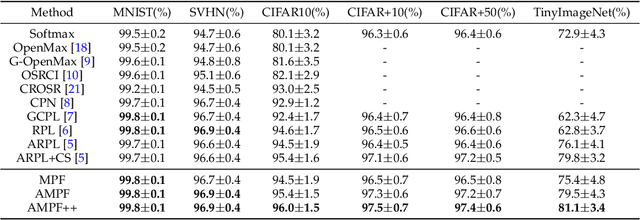
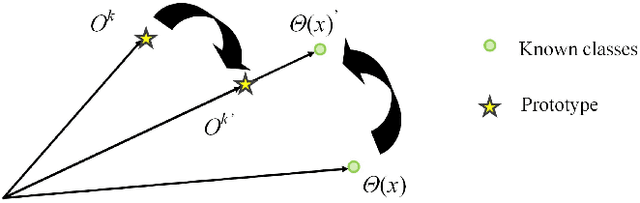
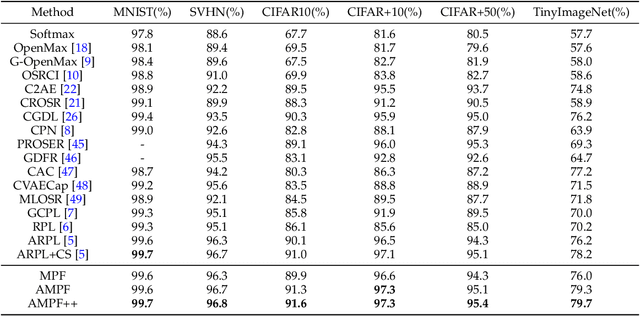
Open set recognition is designed to identify known classes and to reject unknown classes simultaneously. Specifically, identifying known classes and rejecting unknown classes correspond to reducing the empirical risk and the open space risk, respectively. First, the motorial prototype framework (MPF) is proposed, which classifies known classes according to the prototype classification idea. Moreover, a motorial margin constraint term is added into the loss function of the MPF, which can further improve the clustering compactness of known classes in the feature space to reduce both risks. Second, this paper proposes the adversarial motorial prototype framework (AMPF) based on the MPF. On the one hand, this model can generate adversarial samples and add these samples into the training phase; on the other hand, it can further improve the differential mapping ability of the model to known and unknown classes with the adversarial motion of the margin constraint radius. Finally, this paper proposes an upgraded version of the AMPF, AMPF++, which adds much more generated unknown samples into the training phase. In this paper, a large number of experiments prove that the performance of the proposed models is superior to that of other current works.