 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRubricBench: Aligning Model-Generated Rubrics with Human Standards
Mar 03, 2026As Large Language Model (LLM) alignment evolves from simple completions to complex, highly sophisticated generation, Reward Models are increasingly shifting toward rubric-guided evaluation to mitigate surface-level biases. However, the community lacks a unified benchmark to assess this evaluation paradigm, as existing benchmarks lack both the discriminative complexity and the ground-truth rubric annotations required for rigorous analysis. To bridge this gap, we introduce RubricBench, a curated benchmark with 1,147 pairwise comparisons specifically designed to assess the reliability of rubric-based evaluation. Our construction employs a multi-dimensional filtration pipeline to target hard samples featuring nuanced input complexity and misleading surface bias, augmenting each with expert-annotated, atomic rubrics derived strictly from instructions. Comprehensive experiments reveal a substantial capability gap between human-annotated and model-generated rubrics, indicating that even state-of-the-art models struggle to autonomously specify valid evaluation criteria, lagging considerably behind human-guided performance.
SplatPose: Geometry-Aware 6-DoF Pose Estimation from Single RGB Image via 3D Gaussian Splatting
Mar 07, 20256-DoF pose estimation is a fundamental task in computer vision with wide-ranging applications in augmented reality and robotics. Existing single RGB-based methods often compromise accuracy due to their reliance on initial pose estimates and susceptibility to rotational ambiguity, while approaches requiring depth sensors or multi-view setups incur significant deployment costs. To address these limitations, we introduce SplatPose, a novel framework that synergizes 3D Gaussian Splatting (3DGS) with a dual-branch neural architecture to achieve high-precision pose estimation using only a single RGB image. Central to our approach is the Dual-Attention Ray Scoring Network (DARS-Net), which innovatively decouples positional and angular alignment through geometry-domain attention mechanisms, explicitly modeling directional dependencies to mitigate rotational ambiguity. Additionally, a coarse-to-fine optimization pipeline progressively refines pose estimates by aligning dense 2D features between query images and 3DGS-synthesized views, effectively correcting feature misalignment and depth errors from sparse ray sampling. Experiments on three benchmark datasets demonstrate that SplatPose achieves state-of-the-art 6-DoF pose estimation accuracy in single RGB settings, rivaling approaches that depend on depth or multi-view images.
Deep-Learning-Based Adaptive Error-Correction Decoding for Spin-Torque Transfer Magnetic Random Access Memory (STT-MRAM)
Oct 07, 2024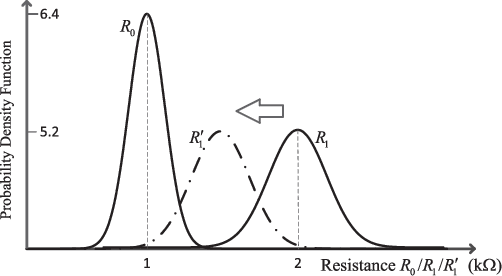
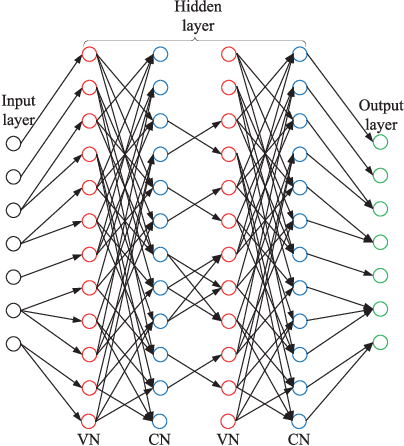
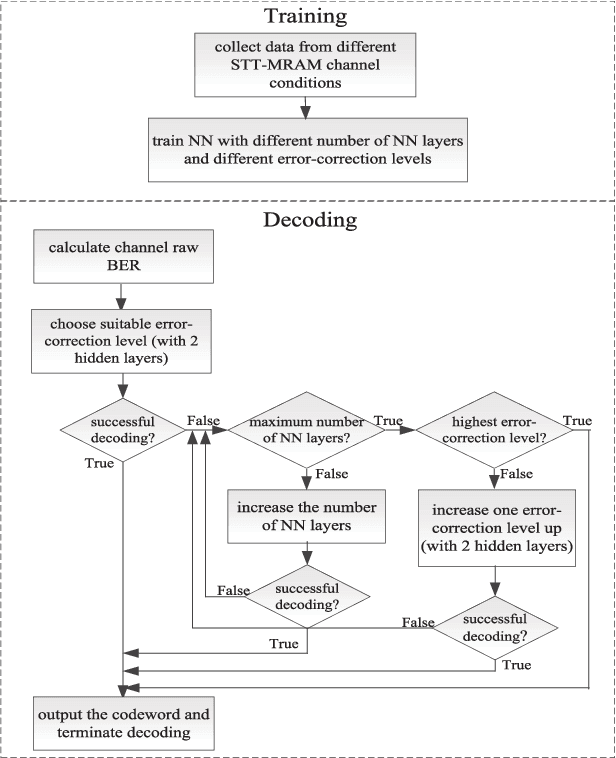
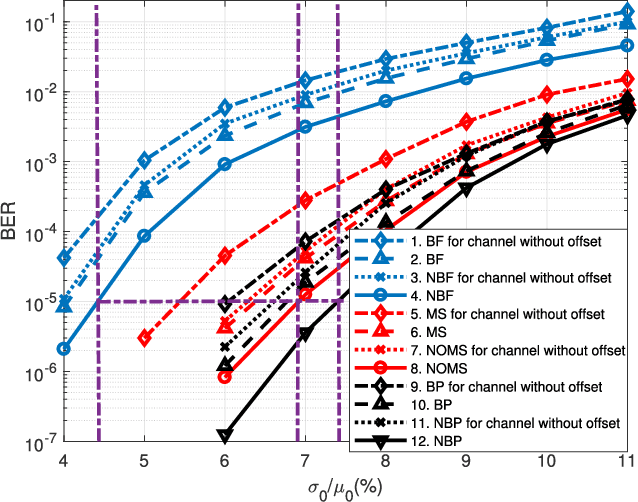
Spin-torque transfer magnetic random access memory (STT-MRAM) is a promising emerging non-volatile memory (NVM) technology with wide applications. However, the data recovery of STT-MRAM is affected by the diversity of channel raw bit error rate (BER) across different dies caused by process variations, as well as the unknown resistance offset due to temperature change. Therefore, it is critical to develop effective decoding algorithms of error correction codes (ECCs) for STT-MRAM. In this article, we first propose a neural bit-flipping (BF) decoding algorithm, which can share the same trellis representation as the state-of-the-art neural decoding algorithms, such as the neural belief propagation (NBP) and neural offset min-sum (NOMS) algorithm. Hence, a neural network (NN) decoder with a uniform architecture but different NN parameters can realize all these neural decoding algorithms. Based on such a unified NN decoder architecture, we further propose a novel deep-learning (DL)-based adaptive decoding algorithm whose decoding complexity can be adjusted according to the change of the channel conditions of STT-MRAM. Extensive experimental evaluation results demonstrate that the proposed neural decoders can greatly improve the performance over the standard decoders, with similar decoding latency and energy consumption. Moreover, the DL-based adaptive decoder can work well over different channel conditions of STT-MRAM irrespective of the unknown resistance offset, with a 50% reduction of the decoding latency and energy consumption compared to the fixed decoder.
A Converting Autoencoder Toward Low-latency and Energy-efficient DNN Inference at the Edge
Mar 11, 2024
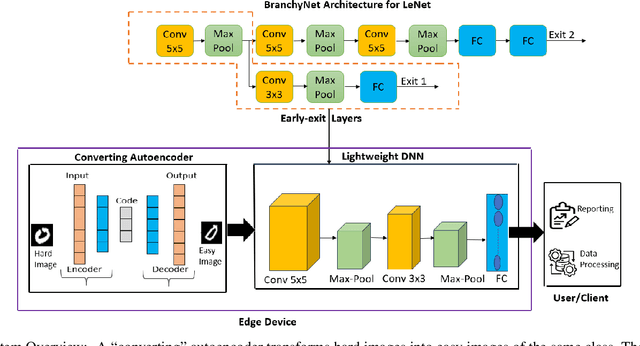


Reducing inference time and energy usage while maintaining prediction accuracy has become a significant concern for deep neural networks (DNN) inference on resource-constrained edge devices. To address this problem, we propose a novel approach based on "converting" autoencoder and lightweight DNNs. This improves upon recent work such as early-exiting framework and DNN partitioning. Early-exiting frameworks spend different amounts of computation power for different input data depending upon their complexity. However, they can be inefficient in real-world scenarios that deal with many hard image samples. On the other hand, DNN partitioning algorithms that utilize the computation power of both the cloud and edge devices can be affected by network delays and intermittent connections between the cloud and the edge. We present CBNet, a low-latency and energy-efficient DNN inference framework tailored for edge devices. It utilizes a "converting" autoencoder to efficiently transform hard images into easy ones, which are subsequently processed by a lightweight DNN for inference. To the best of our knowledge, such autoencoder has not been proposed earlier. Our experimental results using three popular image-classification datasets on a Raspberry Pi 4, a Google Cloud instance, and an instance with Nvidia Tesla K80 GPU show that CBNet achieves up to 4.8x speedup in inference latency and 79% reduction in energy usage compared to competing techniques while maintaining similar or higher accuracy.
Event-based Shape from Polarization with Spiking Neural Networks
Dec 26, 2023Recent advances in event-based shape determination from polarization offer a transformative approach that tackles the trade-off between speed and accuracy in capturing surface geometries. In this paper, we investigate event-based shape from polarization using Spiking Neural Networks (SNNs), introducing the Single-Timestep and Multi-Timestep Spiking UNets for effective and efficient surface normal estimation. Specificially, the Single-Timestep model processes event-based shape as a non-temporal task, updating the membrane potential of each spiking neuron only once, thereby reducing computational and energy demands. In contrast, the Multi-Timestep model exploits temporal dynamics for enhanced data extraction. Extensive evaluations on synthetic and real-world datasets demonstrate that our models match the performance of state-of-the-art Artifical Neural Networks (ANNs) in estimating surface normals, with the added advantage of superior energy efficiency. Our work not only contributes to the advancement of SNNs in event-based sensing but also sets the stage for future explorations in optimizing SNN architectures, integrating multi-modal data, and scaling for applications on neuromorphic hardware.
Event-Driven Tactile Learning with Various Location Spiking Neurons
Oct 11, 2022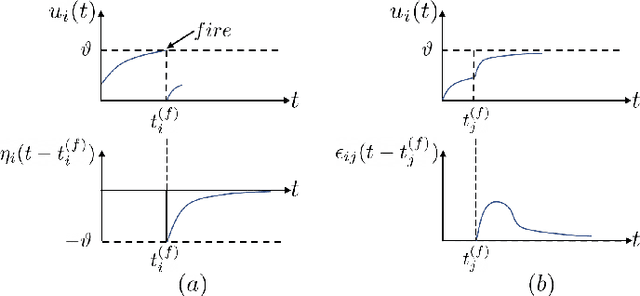
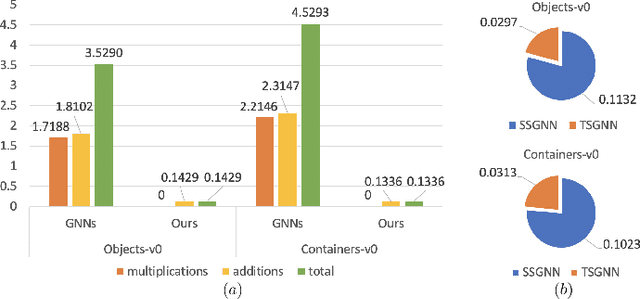
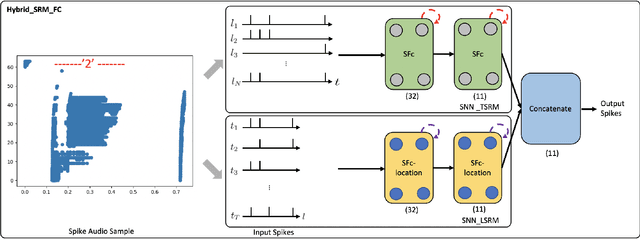
Tactile sensing is essential for a variety of daily tasks. New advances in event-driven tactile sensors and Spiking Neural Networks (SNNs) spur the research in related fields. However, SNN-enabled event-driven tactile learning is still in its infancy due to the limited representation abilities of existing spiking neurons and high spatio-temporal complexity in the data. In this paper, to improve the representation capability of existing spiking neurons, we propose a novel neuron model called "location spiking neuron", which enables us to extract features of event-based data in a novel way. Specifically, based on the classical Time Spike Response Model (TSRM), we develop the Location Spike Response Model (LSRM). In addition, based on the most commonly-used Time Leaky Integrate-and-Fire (TLIF) model, we develop the Location Leaky Integrate-and-Fire (LLIF) model. By exploiting the novel location spiking neurons, we propose several models to capture the complex spatio-temporal dependencies in the event-driven tactile data. Extensive experiments demonstrate the significant improvements of our models over other works on event-driven tactile learning and show the superior energy efficiency of our models and location spiking neurons, which may unlock their potential on neuromorphic hardware.