 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Bio-inspired Heuristically Accelerated Reinforcement Learning for Adaptive Underwater Multi-Agents Behaviour
Feb 10, 2025

This paper describes the problem of coordination of an autonomous Multi-Agent System which aims to solve the coverage planning problem in a complex environment. The considered applications are the detection and identification of objects of interest while covering an area. These tasks, which are highly relevant for space applications, are also of interest among various domains including the underwater context, which is the focus of this study. In this context, coverage planning is traditionally modelled as a Markov Decision Process where a coordinated MAS, a swarm of heterogeneous autonomous underwater vehicles, is required to survey an area and search for objects. This MDP is associated with several challenges: environment uncertainties, communication constraints, and an ensemble of hazards, including time-varying and unpredictable changes in the underwater environment. MARL algorithms can solve highly non-linear problems using deep neural networks and display great scalability against an increased number of agents. Nevertheless, most of the current results in the underwater domain are limited to simulation due to the high learning time of MARL algorithms. For this reason, a novel strategy is introduced to accelerate this convergence rate by incorporating biologically inspired heuristics to guide the policy during training. The PSO method, which is inspired by the behaviour of a group of animals, is selected as a heuristic. It allows the policy to explore the highest quality regions of the action and state spaces, from the beginning of the training, optimizing the exploration/exploitation trade-off. The resulting agent requires fewer interactions to reach optimal performance. The method is applied to the MSAC algorithm and evaluated for a 2D covering area mission in a continuous control environment.
Sim-to-Real Transfer of Adaptive Control Parameters for AUV Stabilization under Current Disturbance
Oct 17, 2023Learning-based adaptive control methods hold the premise of enabling autonomous agents to reduce the effect of process variations with minimal human intervention. However, its application to autonomous underwater vehicles (AUVs) has so far been restricted due to 1) unknown dynamics under the form of sea current disturbance that we can not model properly nor measure due to limited sensor capability and 2) the nonlinearity of AUVs tasks where the controller response at some operating points must be overly conservative in order to satisfy the specification at other operating points. Deep Reinforcement Learning (DRL) can alleviates these limitations by training general-purpose neural network policies, but applications of DRL algorithms to AUVs have been restricted to simulated environments, due to their inherent high sample complexity and distribution shift problem. This paper presents a novel approach, merging the Maximum Entropy Deep Reinforcement Learning framework with a classic model-based control architecture, to formulate an adaptive controller. Within this framework, we introduce a Sim-to-Real transfer strategy comprising the following components: a bio-inspired experience replay mechanism, an enhanced domain randomisation technique, and an evaluation protocol executed on a physical platform. Our experimental assessments demonstrate that this method effectively learns proficient policies from suboptimal simulated models of the AUV, resulting in control performance 3 times higher when transferred to a real-world vehicle, compared to its model-based nonadaptive but optimal counterpart.
Fine-Grained is Too Coarse: A Novel Data-Centric Approach for Efficient Scene Graph Generation
May 30, 2023



Learning to compose visual relationships from raw images in the form of scene graphs is a highly challenging task due to contextual dependencies, but it is essential in computer vision applications that depend on scene understanding. However, no current approaches in Scene Graph Generation (SGG) aim at providing useful graphs for downstream tasks. Instead, the main focus has primarily been on the task of unbiasing the data distribution for predicting more fine-grained relations. That being said, all fine-grained relations are not equally relevant and at least a part of them are of no use for real-world applications. In this work, we introduce the task of Efficient SGG that prioritizes the generation of relevant relations, facilitating the use of Scene Graphs in downstream tasks such as Image Generation. To support further approaches in this task, we present a new dataset, VG150-curated, based on the annotations of the popular Visual Genome dataset. We show through a set of experiments that this dataset contains more high-quality and diverse annotations than the one usually adopted by approaches in SGG. Finally, we show the efficiency of this dataset in the task of Image Generation from Scene Graphs. Our approach can be easily replicated to improve the quality of other Scene Graph Generation datasets.
Commonsense Reasoning for Identifying and Understanding the Implicit Need of Help and Synthesizing Assistive Actions
Feb 23, 2022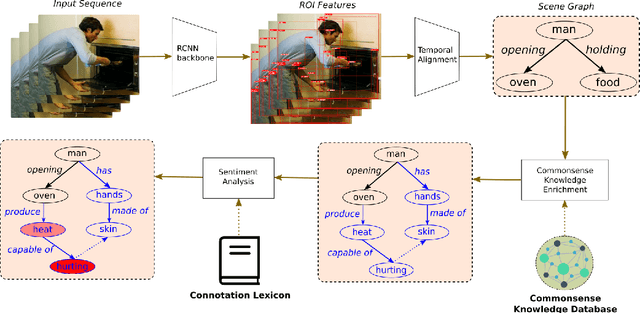
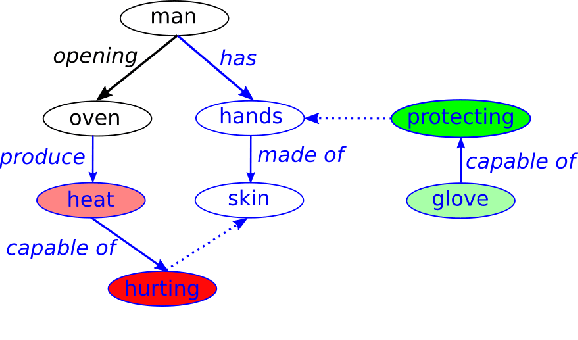
Human-Robot Interaction (HRI) is an emerging subfield of service robotics. While most existing approaches rely on explicit signals (i.e. voice, gesture) to engage, current literature is lacking solutions to address implicit user needs. In this paper, we present an architecture to (a) detect user implicit need of help and (b) generate a set of assistive actions without prior learning. Task (a) will be performed using state-of-the-art solutions for Scene Graph Generation coupled to the use of commonsense knowledge; whereas, task (b) will be performed using additional commonsense knowledge as well as a sentiment analysis on graph structure. Finally, we propose an evaluation of our solution using established benchmarks (e.g. ActionGenome dataset) along with human experiments. The main motivation of our approach is the embedding of the perception-decision-action loop in a single architecture.